Есть ли способ определить, размыто ли изображение?
Мне было интересно, есть ли способ определить, размыто ли изображение или нет, анализируя данные изображения.
12 ответов
nikie это предоставьте такую метрику. Сверните изображение с ядром Лапласа:
1
1 -4 1
1
и используйте надежную максимальную метрику на выходе, чтобы получить число, которое можно использовать для порога. Постарайтесь не сглаживать слишком много изображений перед вычислением лапласиана, потому что вы только узнаете, что сглаженное изображение действительно размыто :-).
еще один очень простой способ оценить резкость изображения-использовать фильтр Лапласа (или журнала) и просто выбрать максимальное значение. Использование надежной меры, такой как 99,9% квантиль, вероятно, лучше, если вы ожидаете шума (т. е. выбор Nth-наивысшего контраста вместо наивысшего контраста.) Если вы ожидаете изменения яркости изображения, вы также должны включить шаг предварительной обработки для нормализации яркости/контраста изображения (например, выравнивание гистограммы).
я реализовал Саймона предложение и это в Mathematica, и попробовал его на нескольких тестовых изображениях:
первый тест размывает тестовые изображения с помощью гауссовского фильтра с различным размером ядра, затем вычисляет БПФ размытого изображения и принимает среднее значение 90% самых высоких частот:
testFft[img_] := Table[
(
blurred = GaussianFilter[img, r];
fft = Fourier[ImageData[blurred]];
{w, h} = Dimensions[fft];
windowSize = Round[w/2.1];
Mean[Flatten[(Abs[
fft[[w/2 - windowSize ;; w/2 + windowSize,
h/2 - windowSize ;; h/2 + windowSize]]])]]
), {r, 0, 10, 0.5}]
результат в логарифмическом участке:
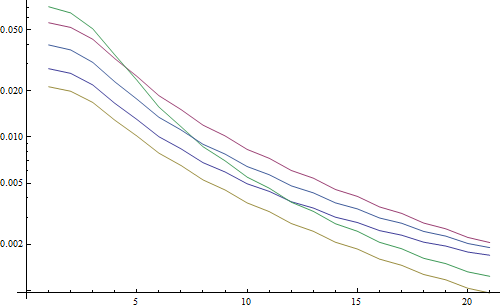
5 строк представляют 5 тестовых изображений, ось X представляет радиус гауссова фильтра. Графики уменьшаются, поэтому БПФ является хорошей мерой для резкости.
это код для оценки размытости" самого высокого журнала": он просто применяет фильтр журнала и возвращает самый яркий пиксель в результате фильтра:
testLaplacian[img_] := Table[
(
blurred = GaussianFilter[img, r];
Max[Flatten[ImageData[LaplacianGaussianFilter[blurred, 1]]]];
), {r, 0, 10, 0.5}]
результат в логарифмическом участке:
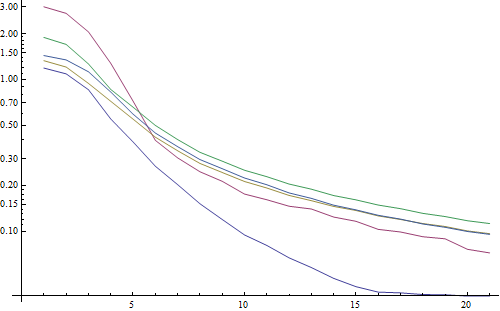
разброс для нечетких изображений здесь немного лучше (2.5 vs 3.3), главным образом потому, что этот метод использует только самый сильный контраст в изображении, в то время как FFT по существу является средним по всему изображению. Функции также уменьшаются быстрее, поэтому может быть проще установить "размытый" порог.
во время некоторой работы с объективом автофокусировки я наткнулся на этот очень полезный набор алгоритмов для обнаружение фокусировки изображения. Он реализован в MATLAB, но большинство функций довольно легко переносить в OpenCV с помощью filter2D.
это в основном реализация опроса многих алгоритмов измерения фокуса. Если вы хотите читать оригинальные статьи, ссылки на авторов алгоритмов в коде. Документ 2012 года Pertuz, et Эл. анализ операторов измерения фокуса для формы от фокуса (SFF) дает большой обзор всех этих мер, а также их производительности (как с точки зрения скорости, так и точности применительно к SFF).
EDIT: добавлен код MATLAB на случай, если ссылка умрет.
function FM = fmeasure(Image, Measure, ROI)
%This function measures the relative degree of focus of
%an image. It may be invoked as:
%
% FM = fmeasure(Image, Method, ROI)
%
%Where
% Image, is a grayscale image and FM is the computed
% focus value.
% Method, is the focus measure algorithm as a string.
% see 'operators.txt' for a list of focus
% measure methods.
% ROI, Image ROI as a rectangle [xo yo width heigth].
% if an empty argument is passed, the whole
% image is processed.
%
% Said Pertuz
% Abr/2010
if ~isempty(ROI)
Image = imcrop(Image, ROI);
end
WSize = 15; % Size of local window (only some operators)
switch upper(Measure)
case 'ACMO' % Absolute Central Moment (Shirvaikar2004)
if ~isinteger(Image), Image = im2uint8(Image);
end
FM = AcMomentum(Image);
case 'BREN' % Brenner's (Santos97)
[M N] = size(Image);
DH = Image;
DV = Image;
DH(1:M-2,:) = diff(Image,2,1);
DV(:,1:N-2) = diff(Image,2,2);
FM = max(DH, DV);
FM = FM.^2;
FM = mean2(FM);
case 'CONT' % Image contrast (Nanda2001)
ImContrast = inline('sum(abs(x(:)-x(5)))');
FM = nlfilter(Image, [3 3], ImContrast);
FM = mean2(FM);
case 'CURV' % Image Curvature (Helmli2001)
if ~isinteger(Image), Image = im2uint8(Image);
end
M1 = [-1 0 1;-1 0 1;-1 0 1];
M2 = [1 0 1;1 0 1;1 0 1];
P0 = imfilter(Image, M1, 'replicate', 'conv')/6;
P1 = imfilter(Image, M1', 'replicate', 'conv')/6;
P2 = 3*imfilter(Image, M2, 'replicate', 'conv')/10 ...
-imfilter(Image, M2', 'replicate', 'conv')/5;
P3 = -imfilter(Image, M2, 'replicate', 'conv')/5 ...
+3*imfilter(Image, M2, 'replicate', 'conv')/10;
FM = abs(P0) + abs(P1) + abs(P2) + abs(P3);
FM = mean2(FM);
case 'DCTE' % DCT energy ratio (Shen2006)
FM = nlfilter(Image, [8 8], @DctRatio);
FM = mean2(FM);
case 'DCTR' % DCT reduced energy ratio (Lee2009)
FM = nlfilter(Image, [8 8], @ReRatio);
FM = mean2(FM);
case 'GDER' % Gaussian derivative (Geusebroek2000)
N = floor(WSize/2);
sig = N/2.5;
[x,y] = meshgrid(-N:N, -N:N);
G = exp(-(x.^2+y.^2)/(2*sig^2))/(2*pi*sig);
Gx = -x.*G/(sig^2);Gx = Gx/sum(Gx(:));
Gy = -y.*G/(sig^2);Gy = Gy/sum(Gy(:));
Rx = imfilter(double(Image), Gx, 'conv', 'replicate');
Ry = imfilter(double(Image), Gy, 'conv', 'replicate');
FM = Rx.^2+Ry.^2;
FM = mean2(FM);
case 'GLVA' % Graylevel variance (Krotkov86)
FM = std2(Image);
case 'GLLV' %Graylevel local variance (Pech2000)
LVar = stdfilt(Image, ones(WSize,WSize)).^2;
FM = std2(LVar)^2;
case 'GLVN' % Normalized GLV (Santos97)
FM = std2(Image)^2/mean2(Image);
case 'GRAE' % Energy of gradient (Subbarao92a)
Ix = Image;
Iy = Image;
Iy(1:end-1,:) = diff(Image, 1, 1);
Ix(:,1:end-1) = diff(Image, 1, 2);
FM = Ix.^2 + Iy.^2;
FM = mean2(FM);
case 'GRAT' % Thresholded gradient (Snatos97)
Th = 0; %Threshold
Ix = Image;
Iy = Image;
Iy(1:end-1,:) = diff(Image, 1, 1);
Ix(:,1:end-1) = diff(Image, 1, 2);
FM = max(abs(Ix), abs(Iy));
FM(FM<Th)=0;
FM = sum(FM(:))/sum(sum(FM~=0));
case 'GRAS' % Squared gradient (Eskicioglu95)
Ix = diff(Image, 1, 2);
FM = Ix.^2;
FM = mean2(FM);
case 'HELM' %Helmli's mean method (Helmli2001)
MEANF = fspecial('average',[WSize WSize]);
U = imfilter(Image, MEANF, 'replicate');
R1 = U./Image;
R1(Image==0)=1;
index = (U>Image);
FM = 1./R1;
FM(index) = R1(index);
FM = mean2(FM);
case 'HISE' % Histogram entropy (Krotkov86)
FM = entropy(Image);
case 'HISR' % Histogram range (Firestone91)
FM = max(Image(:))-min(Image(:));
case 'LAPE' % Energy of laplacian (Subbarao92a)
LAP = fspecial('laplacian');
FM = imfilter(Image, LAP, 'replicate', 'conv');
FM = mean2(FM.^2);
case 'LAPM' % Modified Laplacian (Nayar89)
M = [-1 2 -1];
Lx = imfilter(Image, M, 'replicate', 'conv');
Ly = imfilter(Image, M', 'replicate', 'conv');
FM = abs(Lx) + abs(Ly);
FM = mean2(FM);
case 'LAPV' % Variance of laplacian (Pech2000)
LAP = fspecial('laplacian');
ILAP = imfilter(Image, LAP, 'replicate', 'conv');
FM = std2(ILAP)^2;
case 'LAPD' % Diagonal laplacian (Thelen2009)
M1 = [-1 2 -1];
M2 = [0 0 -1;0 2 0;-1 0 0]/sqrt(2);
M3 = [-1 0 0;0 2 0;0 0 -1]/sqrt(2);
F1 = imfilter(Image, M1, 'replicate', 'conv');
F2 = imfilter(Image, M2, 'replicate', 'conv');
F3 = imfilter(Image, M3, 'replicate', 'conv');
F4 = imfilter(Image, M1', 'replicate', 'conv');
FM = abs(F1) + abs(F2) + abs(F3) + abs(F4);
FM = mean2(FM);
case 'SFIL' %Steerable filters (Minhas2009)
% Angles = [0 45 90 135 180 225 270 315];
N = floor(WSize/2);
sig = N/2.5;
[x,y] = meshgrid(-N:N, -N:N);
G = exp(-(x.^2+y.^2)/(2*sig^2))/(2*pi*sig);
Gx = -x.*G/(sig^2);Gx = Gx/sum(Gx(:));
Gy = -y.*G/(sig^2);Gy = Gy/sum(Gy(:));
R(:,:,1) = imfilter(double(Image), Gx, 'conv', 'replicate');
R(:,:,2) = imfilter(double(Image), Gy, 'conv', 'replicate');
R(:,:,3) = cosd(45)*R(:,:,1)+sind(45)*R(:,:,2);
R(:,:,4) = cosd(135)*R(:,:,1)+sind(135)*R(:,:,2);
R(:,:,5) = cosd(180)*R(:,:,1)+sind(180)*R(:,:,2);
R(:,:,6) = cosd(225)*R(:,:,1)+sind(225)*R(:,:,2);
R(:,:,7) = cosd(270)*R(:,:,1)+sind(270)*R(:,:,2);
R(:,:,7) = cosd(315)*R(:,:,1)+sind(315)*R(:,:,2);
FM = max(R,[],3);
FM = mean2(FM);
case 'SFRQ' % Spatial frequency (Eskicioglu95)
Ix = Image;
Iy = Image;
Ix(:,1:end-1) = diff(Image, 1, 2);
Iy(1:end-1,:) = diff(Image, 1, 1);
FM = mean2(sqrt(double(Iy.^2+Ix.^2)));
case 'TENG'% Tenengrad (Krotkov86)
Sx = fspecial('sobel');
Gx = imfilter(double(Image), Sx, 'replicate', 'conv');
Gy = imfilter(double(Image), Sx', 'replicate', 'conv');
FM = Gx.^2 + Gy.^2;
FM = mean2(FM);
case 'TENV' % Tenengrad variance (Pech2000)
Sx = fspecial('sobel');
Gx = imfilter(double(Image), Sx, 'replicate', 'conv');
Gy = imfilter(double(Image), Sx', 'replicate', 'conv');
G = Gx.^2 + Gy.^2;
FM = std2(G)^2;
case 'VOLA' % Vollath's correlation (Santos97)
Image = double(Image);
I1 = Image; I1(1:end-1,:) = Image(2:end,:);
I2 = Image; I2(1:end-2,:) = Image(3:end,:);
Image = Image.*(I1-I2);
FM = mean2(Image);
case 'WAVS' %Sum of Wavelet coeffs (Yang2003)
[C,S] = wavedec2(Image, 1, 'db6');
H = wrcoef2('h', C, S, 'db6', 1);
V = wrcoef2('v', C, S, 'db6', 1);
D = wrcoef2('d', C, S, 'db6', 1);
FM = abs(H) + abs(V) + abs(D);
FM = mean2(FM);
case 'WAVV' %Variance of Wav...(Yang2003)
[C,S] = wavedec2(Image, 1, 'db6');
H = abs(wrcoef2('h', C, S, 'db6', 1));
V = abs(wrcoef2('v', C, S, 'db6', 1));
D = abs(wrcoef2('d', C, S, 'db6', 1));
FM = std2(H)^2+std2(V)+std2(D);
case 'WAVR'
[C,S] = wavedec2(Image, 3, 'db6');
H = abs(wrcoef2('h', C, S, 'db6', 1));
V = abs(wrcoef2('v', C, S, 'db6', 1));
D = abs(wrcoef2('d', C, S, 'db6', 1));
A1 = abs(wrcoef2('a', C, S, 'db6', 1));
A2 = abs(wrcoef2('a', C, S, 'db6', 2));
A3 = abs(wrcoef2('a', C, S, 'db6', 3));
A = A1 + A2 + A3;
WH = H.^2 + V.^2 + D.^2;
WH = mean2(WH);
WL = mean2(A);
FM = WH/WL;
otherwise
error('Unknown measure %s',upper(Measure))
end
end
%************************************************************************
function fm = AcMomentum(Image)
[M N] = size(Image);
Hist = imhist(Image)/(M*N);
Hist = abs((0:255)-255*mean2(Image))'.*Hist;
fm = sum(Hist);
end
%******************************************************************
function fm = DctRatio(M)
MT = dct2(M).^2;
fm = (sum(MT(:))-MT(1,1))/MT(1,1);
end
%************************************************************************
function fm = ReRatio(M)
M = dct2(M);
fm = (M(1,2)^2+M(1,3)^2+M(2,1)^2+M(2,2)^2+M(3,1)^2)/(M(1,1)^2);
end
%******************************************************************
несколько примеров версий OpenCV:
// OpenCV port of 'LAPM' algorithm (Nayar89)
double modifiedLaplacian(const cv::Mat& src)
{
cv::Mat M = (Mat_<double>(3, 1) << -1, 2, -1);
cv::Mat G = cv::getGaussianKernel(3, -1, CV_64F);
cv::Mat Lx;
cv::sepFilter2D(src, Lx, CV_64F, M, G);
cv::Mat Ly;
cv::sepFilter2D(src, Ly, CV_64F, G, M);
cv::Mat FM = cv::abs(Lx) + cv::abs(Ly);
double focusMeasure = cv::mean(FM).val[0];
return focusMeasure;
}
// OpenCV port of 'LAPV' algorithm (Pech2000)
double varianceOfLaplacian(const cv::Mat& src)
{
cv::Mat lap;
cv::Laplacian(src, lap, CV_64F);
cv::Scalar mu, sigma;
cv::meanStdDev(lap, mu, sigma);
double focusMeasure = sigma.val[0]*sigma.val[0];
return focusMeasure;
}
// OpenCV port of 'TENG' algorithm (Krotkov86)
double tenengrad(const cv::Mat& src, int ksize)
{
cv::Mat Gx, Gy;
cv::Sobel(src, Gx, CV_64F, 1, 0, ksize);
cv::Sobel(src, Gy, CV_64F, 0, 1, ksize);
cv::Mat FM = Gx.mul(Gx) + Gy.mul(Gy);
double focusMeasure = cv::mean(FM).val[0];
return focusMeasure;
}
// OpenCV port of 'GLVN' algorithm (Santos97)
double normalizedGraylevelVariance(const cv::Mat& src)
{
cv::Scalar mu, sigma;
cv::meanStdDev(src, mu, sigma);
double focusMeasure = (sigma.val[0]*sigma.val[0]) / mu.val[0];
return focusMeasure;
}
отсутствие гарантий на Ли или не эти измерения самый лучший выбор для вашей проблемы, но если вы отследите документы, связанные с этими мерами, они могут дать вам больше информации. Надеюсь, вы найдете код, полезный! Я это знаю.
построение ответа Nike. Его просто реализовать метод на основе Лапласа с opencv:
short GetSharpness(char* data, unsigned int width, unsigned int height)
{
// assumes that your image is already in planner yuv or 8 bit greyscale
IplImage* in = cvCreateImage(cvSize(width,height),IPL_DEPTH_8U,1);
IplImage* out = cvCreateImage(cvSize(width,height),IPL_DEPTH_16S,1);
memcpy(in->imageData,data,width*height);
// aperture size of 1 corresponds to the correct matrix
cvLaplace(in, out, 1);
short maxLap = -32767;
short* imgData = (short*)out->imageData;
for(int i =0;i<(out->imageSize/2);i++)
{
if(imgData[i] > maxLap) maxLap = imgData[i];
}
cvReleaseImage(&in);
cvReleaseImage(&out);
return maxLap;
}
вернет короткий, указывающий на максимальную обнаруженную резкость, которая, основываясь на моих тестах на реальных образцах, является довольно хорошим индикатором того, находится ли камера в фокусе или нет. Неудивительно, что нормальные значения зависят от сцены, но много меньше, чем метод FFT, который должен быть высоким с ложноположительной скоростью, чтобы быть полезным в моем приложение.
Я придумал совершенно другое решение. Мне нужно было проанализировать кадры видео, чтобы найти самый резкий в каждом (X) кадрах. Таким образом, я бы обнаружил размытие движения и/или изображения вне фокуса.
Я закончил использование Canny Edge detection, и я получил очень хорошие результаты почти со всеми видами видео (с помощью метода nikie у меня были проблемы с цифровыми видео VHS и тяжелыми переплетенными видео).
я оптимизировал производительность, установив область интереса (ROI) на исходном изображении.
Использование EmguCV:
//Convert image using Canny
using (Image<Gray, byte> imgCanny = imgOrig.Canny(225, 175))
{
//Count the number of pixel representing an edge
int nCountCanny = imgCanny.CountNonzero()[0];
//Compute a sharpness grade:
//< 1.5 = blurred, in movement
//de 1.5 à 6 = acceptable
//> 6 =stable, sharp
double dSharpness = (nCountCanny * 1000.0 / (imgCanny.Cols * imgCanny.Rows));
}
спасибо Ники за это отличное предложение Лапласа. OpenCV docs указал мне в том же направлении: использование python, cv2 (opencv 2.4.10) и numpy...
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
numpy.max(cv2.convertScaleAbs(cv2.Laplacian(gray_image,3)))
результат от 0-255. Я нашел что-то более 200ish очень в фокусе, и к 100 это заметно размыто. Макс никогда не получает под 20, даже если он полностью размыт.
один из способов, который я сейчас использую, измеряет распространение ребер на изображении. Посмотрите на эту бумагу:
@ARTICLE{Marziliano04perceptualblur,
author = {Pina Marziliano and Frederic Dufaux and Stefan Winkler and Touradj Ebrahimi},
title = {Perceptual blur and ringing metrics: Application to JPEG2000,” Signal Process},
journal = {Image Commun},
year = {2004},
pages = {163--172} }
обычно это за стеной, но я видел несколько бесплатных копий. В основном они находят вертикальные ребра на изображении, а затем измеряют ширину этих ребер. Усреднение ширины дает окончательный результат оценки размытия для изображения. Более широкие края соответствуют размытым изображениям, и наоборот.
эта проблема относится к области оценка качества изображения без ссылки. Если вы посмотрите на Google Scholar, вы получите много полезных ссылок.
редактировать
вот график оценок размытия, полученных для 5 изображений в сообщении Ники. Более высокие значения соответствуют большему размытию. Я использовал гауссов фильтр фиксированного размера 11x11 и варьировал стандартное отклонение (используя imagemagick's convert команда для получения размытого изображения.)
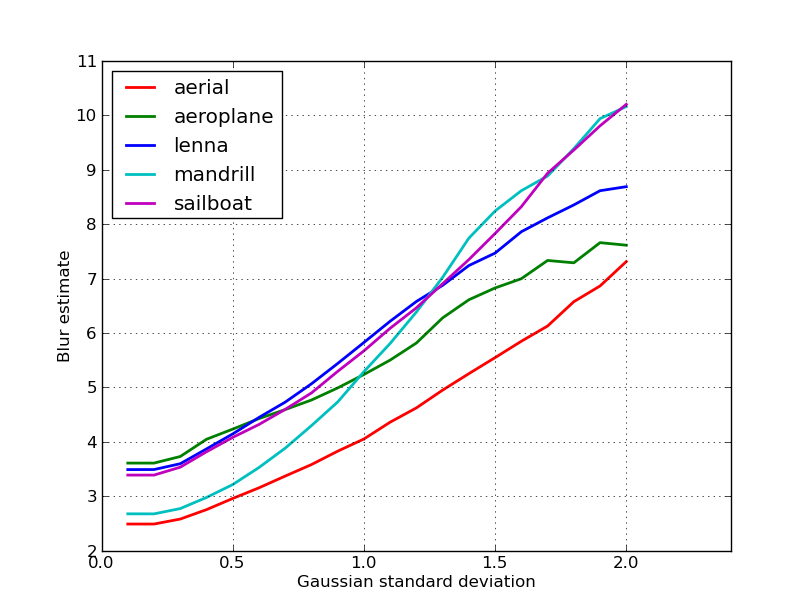
Если вы сравниваете изображения разных размеров, не забудьте нормализовать ширину изображения, так как большие изображения будут иметь более широкие края.
ответы выше прояснили многие вещи, но я думаю, что полезно сделать концептуальное различие.
Что делать, если вы берете идеально на фокус изображение размытого изображения?
проблема обнаружения размытия только хорошо поставлена, когда у вас есть ссылка. Если вам нужно спроектировать, например, систему автофокусировки, вы сравниваете последовательность изображений, сделанных с разной степенью размытия или сглаживания, и пытаетесь найти точку минимума размытие внутри этого набора. Другими словами, вам нужно перекрестно ссылаться на различные изображения, используя один из методов, иллюстрированных выше (в основном-с различными возможными уровнями уточнения в подходе-поиск одного изображения с самым высоким содержанием высокой частоты).
я попробовал решение на основе фильтра Лапласа из этой пост. Мне это не помогло. Итак, я попробовал решение из этой пост и это было хорошо для моего случая (но медленно):
import cv2
image = cv2.imread("test.jpeg")
height, width = image.shape[:2]
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
def px(x, y):
return int(gray[y, x])
sum = 0
for x in range(width-1):
for y in range(height):
sum += abs(px(x, y) - px(x+1, y))
менее размытое изображение имеет максимальное sum ценность!
вы также можете настроить скорость и точность, изменяя шаг, например,
эта часть
for x in range(width - 1):
вы можете заменить этим
for x in range(0, width - 1, 10):
код Matlab двух методов, опубликованных в высоко оцененных журналах (транзакции IEEE по обработке изображений), доступен здесь:https://ivulab.asu.edu/software
проверьте алгоритмы CPBDM и JNBM. Если вы проверяете код, его не очень сложно портировать, и, кстати, он основан на методе Marzialiano в качестве базовой функции.
я реализовал его использование fft в matlab и проверить гистограмму FFT вычислить среднее и std, но также fit функция может быть сделано
fa = abs(fftshift(fft(sharp_img)));
fb = abs(fftshift(fft(blured_img)));
f1=20*log10(0.001+fa);
f2=20*log10(0.001+fb);
figure,imagesc(f1);title('org')
figure,imagesc(f2);title('blur')
figure,hist(f1(:),100);title('org')
figure,hist(f2(:),100);title('blur')
mf1=mean(f1(:));
mf2=mean(f2(:));
mfd1=median(f1(:));
mfd2=median(f2(:));
sf1=std(f1(:));
sf2=std(f2(:));
Это то, что я делаю в Opencv для обнаружения качества фокусировки в регионе:
Mat grad;
int scale = 1;
int delta = 0;
int ddepth = CV_8U;
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y;
/// Gradient X
Sobel(matFromSensor, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT);
/// Gradient Y
Sobel(matFromSensor, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
convertScaleAbs(grad_y, abs_grad_y);
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
cv::Scalar mu, sigma;
cv::meanStdDev(grad, /* mean */ mu, /*stdev*/ sigma);
focusMeasure = mu.val[0] * mu.val[0];