Как эффективно определить, является ли многоугольник выпуклым, невыпуклым или сложным?
из man-страницы для XFillPolygon:
если
shapeis комплекс путь может иметь самопересечений. Обратите внимание, что смежные совпадающие точки На пути не рассматриваются как самосечение.если
shapeis выпуклой, для каждой пары точек внутри многоугольника, отрезок прямой, соединяющий их, не пересекает путь. Если известно клиенту, указав выпуклой может улучшить производительность. Если указать выпуклой для пути, который не является выпуклым, Результаты Графики не определены.если
shapeis Nonconvex, путь не пересекается сам с собой, но форма не является полностью выпуклой. Если известно клиенту, указав Nonconvex вместо комплекс может повысить производительность. Если указать Nonconvex для a self-intersecting path, Результаты Графики не определены.
у меня проблемы с производительностью с fill XFillPolygon и, как следует из справочной страницы, первый шаг, который я хочу сделать, - указать правильную форму многоугольника. В настоящее время я использую комплекс на всякий случай.
существует ли эффективный алгоритм для определения того, является ли многоугольник (определенный серией координат) выпуклым, невыпуклым или сложным?
10 ответов
Примечание: вычисление выпуклой оболочки набора точек совершенно необязательно, если вы просто хотите определить, представляет ли список точек, представляющих многоугольник, выпуклый многоугольник.
посмотреть Алгоритм Упаковки Подарков:
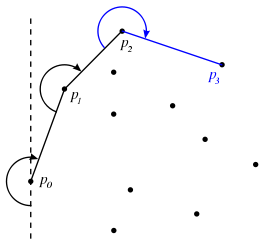
предполагая, что все ваши полигоны находятся в порядке против часовой стрелки, в тот момент, когда ваш не начальный полярный угол делает левый поворот, вы знаете, что он не выпуклый.
вы могли бы увидеть, если сегменты линии пересекайтесь друг с другом, чтобы выяснить, является ли многоугольник сложным (но я не уверен, что это самый быстрый способ).
вы можете сделать вещи намного проще, чем алгоритм подарочной упаковки... это хороший ответ, когда у вас есть набор точек без какой-либо конкретной границы, и нужно найти выпуклую оболочку.
напротив, рассмотрим случай, когда многоугольник не является самопересекающимся и состоит из набора точек в списке, где последовательные точки образуют границу. В этом случае гораздо проще выяснить, является ли многоугольник выпуклым или нет (и вам не нужно вычислять какие-либо углы, либо):
для каждой последовательной пары ребер многоугольника (каждого триплета точек) вычислите z-компонент поперечного произведения векторов, определенных ребрами, указывающими на точки в порядке возрастания. Взять векторное произведение этих векторов:
given p[k], p[k+1], p[k+2] each with coordinates x, y:
dx1 = x[k+1]-x[k]
dy1 = y[k+1]-y[k]
dx2 = x[k+2]-x[k+1]
dy2 = y[k+2]-y[k+1]
zcrossproduct = dx1*dy2 - dy1*dx2
многоугольник выпукл, если z-компоненты поперечных произведений либо все положительные, либо все отрицательные. В противном случае многоугольник называется невыпуклым.
Если есть N точек, убедитесь, что вы вычисляете N перекрестных произведений, например, обязательно используйте триплеты (p[N-2],p[N-1],p[0]) и (p[N-1],p[0],p[1]).
если многоугольник является самопересекающимся, то это не соответствует техническому определению выпуклости даже если его направленные углы находятся в одном направлении, в этом случае вышеуказанный подход не даст правильного результата.
следующая функция/метод Java является реализацией алгоритма, описанного в ответ.
public boolean isConvex()
{
if (_vertices.size() < 4)
return true;
boolean sign = false;
int n = _vertices.size();
for(int i = 0; i < n; i++)
{
double dx1 = _vertices.get((i + 2) % n).X - _vertices.get((i + 1) % n).X;
double dy1 = _vertices.get((i + 2) % n).Y - _vertices.get((i + 1) % n).Y;
double dx2 = _vertices.get(i).X - _vertices.get((i + 1) % n).X;
double dy2 = _vertices.get(i).Y - _vertices.get((i + 1) % n).Y;
double zcrossproduct = dx1 * dy2 - dy1 * dx2;
if (i == 0)
sign = zcrossproduct > 0;
else if (sign != (zcrossproduct > 0))
return false;
}
return true;
}
алгоритм гарантированно работает до тех пор, пока вершины упорядочены (по часовой стрелке или против часовой стрелки), и у вас нет самопересекающихся ребер (т. е. он работает только для простые многоугольники).
этот вопрос теперь является первым элементом в Bing или Google при поиске "определить выпуклый многоугольник.- Однако ни один из ответов недостаточно хорош.
The принятый ответ от @EugeneYokota работает, проверяя, можно ли сделать неупорядоченный набор точек выпуклым многоугольником, но это не то, что просил OP. Он попросил способ проверить, является ли данный многоугольник выпуклым или нет. ("Многоугольник" в информатике обычно определено [как в документация XFillPolygon] как упорядоченный массив 2D точек, с последовательными точками, Соединенными со стороной, а также последней точкой к первой.) Кроме того, алгоритм подарочной упаковки в этом случае будет иметь временную сложность O(n^2) на n points-что намного больше, чем необходимо для решения этой проблемы, в то время как вопрос требует эффективного алгоритма.
ответ @ JasonS вместе с другие ответы, которые следуют его идее, принимает звездчатых многоугольников например,пентаграмма или в комментарии @zenna, но звездные полигоны не считаются выпуклыми. Как @plasmacel отмечает в комментарии, это хороший подход для использования, если у вас есть предварительные знания о том, что многоугольник не является самопересекающимся, но он может потерпеть неудачу, если у вас нет этих знаний.
@Sekhat это!--10--> - это правильно, но он также имеет время-сложность O(n^2) и, таким образом, является неэффективным.
@ LorenPechtel добавил ответ после ее редактирования лучше всего здесь, но это неопределенно.
правильный алгоритм с оптимальной сложностью
алгоритм, который я здесь представляю, имеет временную сложность O(n), правильно проверяет, является ли многоугольник выпуклым или нет, и проходит все тесты, которые я бросил на него. Идея заключается в Траверс сторон многоугольника, отмечая направление каждой стороны и подписанное изменение направления между последовательными сторонами. "Подписано" здесь означает, что левый-положительный, а правый-отрицательный (или наоборот), а прямой-ноль. Эти углы нормируются, чтобы быть между минус-pi (эксклюзив) и pi (включительно). резюме все эти углы изменения направления (a.к. a прогиб углы) вместе приведет к плюс-или-минус один ход (т. е. 360 Градусы) для выпуклого многоугольника, в то время как звездообразный многоугольник (или самопересекающаяся петля) будет иметь другую сумму ( n * 360 градусов, для n повороты в целом, для полигонов, где все углы отклонения имеют один и тот же знак). Поэтому мы должны проверить, что сумма углов изменения направления равна плюс-минус одному повороту. Мы также проверяем, что углы изменения направления все положительные или все отрицательные и не обратные (радианы pi), все точки являются фактическими 2D точками, и что последовательные вершины не идентичны. (Этот последний момент спорен-вы можете разрешить повторные вершины,но я предпочитаю запретить их.) Комбинация этих проверок захватывает все выпуклые и невыпуклые многоугольники.
вот код для Python 3, который реализует алгоритм и включает в себя некоторые незначительные эффективности. Код выглядит длиннее, чем на самом деле, из-за строк комментариев и бухгалтерии, участвующих во избежание повторных точечных обращений.
TWO_PI = 2 * pi
def is_convex_polygon(polygon):
"""Return True if the polynomial defined by the sequence of 2D
points is 'strictly convex': points are valid, side lengths non-
zero, interior angles are strictly between zero and a straight
angle, and the polygon does not intersect itself.
NOTES: 1. Algorithm: the signed changes of the direction angles
from one side to the next side must be all positive or
all negative, and their sum must equal plus-or-minus
one full turn (2 pi radians). Also check for too few,
invalid, or repeated points.
2. No check is explicitly done for zero internal angles
(180 degree direction-change angle) as this is covered
in other ways, including the `n < 3` check.
"""
try: # needed for any bad points or direction changes
# Check for too few points
if len(polygon) < 3:
return False
# Get starting information
old_x, old_y = polygon[-2]
new_x, new_y = polygon[-1]
new_direction = atan2(new_y - old_y, new_x - old_x)
angle_sum = 0.0
# Check each point (the side ending there, its angle) and accum. angles
for ndx, newpoint in enumerate(polygon):
# Update point coordinates and side directions, check side length
old_x, old_y, old_direction = new_x, new_y, new_direction
new_x, new_y = newpoint
new_direction = atan2(new_y - old_y, new_x - old_x)
if old_x == new_x and old_y == new_y:
return False # repeated consecutive points
# Calculate & check the normalized direction-change angle
angle = new_direction - old_direction
if angle <= -pi:
angle += TWO_PI # make it in half-open interval (-Pi, Pi]
elif angle > pi:
angle -= TWO_PI
if ndx == 0: # if first time through loop, initialize orientation
if angle == 0.0:
return False
orientation = 1.0 if angle > 0.0 else -1.0
else: # if other time through loop, check orientation is stable
if orientation * angle <= 0.0: # not both pos. or both neg.
return False
# Accumulate the direction-change angle
angle_sum += angle
# Check that the total number of full turns is plus-or-minus 1
return abs(round(angle_sum / TWO_PI)) == 1
except (ArithmeticError, TypeError, ValueError):
return False # any exception means not a proper convex polygon
чтобы проверить выпуклость многоугольника, каждая точка многоугольника должна быть на уровне или за каждой линией.
вот пример картинки:
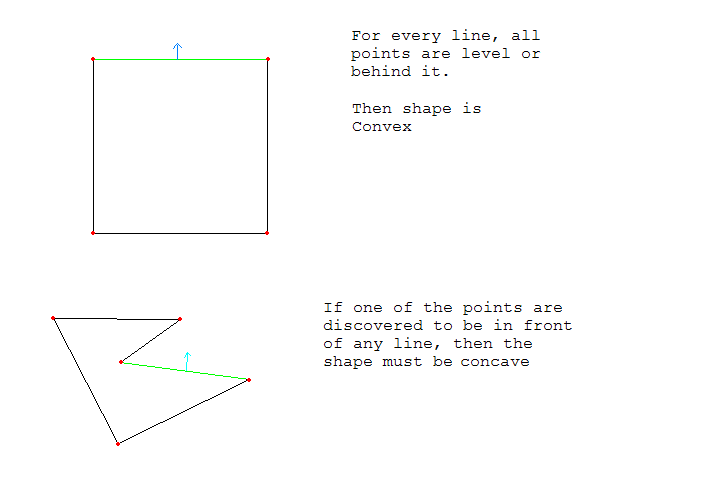
вот тест, чтобы проверить, является ли многоугольник выпуклой.
рассмотрим каждый набор из трех точек вдоль многоугольника. Если каждый угол равен 180 градусам или меньше, у вас есть выпуклый многоугольник. Когда вы вычисляете каждый угол, также держите идущую сумму (180-angle). Для выпуклого многоугольника это составит 360.
этот тест выполняется в O (n) времени.
также учтите, что в большинстве случаев этот расчет можно сделать один раз и сохранить большую часть времени у вас есть набор полигонов для работы, которые не меняются все время.
на ответ @RoryDaulton мне кажется лучшим, но что, если один из углов точно равен 0? Некоторые могут захотеть, чтобы такой крайний случай вернул True, и в этом случае измените "
if orientation * angle < 0.0: # not both pos. or both neg.
вот мои тестовые примеры, которые подчеркивают проблему:
# A square
assert is_convex_polygon( ((0,0), (1,0), (1,1), (0,1)) )
# This LOOKS like a square, but it has an extra point on one of the edges.
assert is_convex_polygon( ((0,0), (0.5,0), (1,0), (1,1), (0,1)) )
2-й assert терпит неудачу в исходном ответе. А должно? Для моего случая использования я бы предпочел этого не делать.
я реализовал оба алгоритма: один, опубликованный @UriGoren (с небольшим улучшением - только целочисленная математика) и один из @RoryDaulton, в Java. У меня были некоторые проблемы, потому что мой многоугольник закрыт, поэтому оба алгоритма рассматривали второй как вогнутый, когда он был выпуклым. Поэтому я изменил его, чтобы предотвратить такую ситуацию. Мои методы также используют базовый индекс (который может быть или не быть 0).
Это мои тестовые вершины:
// concave
int []x = {0,100,200,200,100,0,0};
int []y = {50,0,50,200,50,200,50};
// convex
int []x = {0,100,200,100,0,0};
int []y = {50,0,50,200,200,50};
и теперь алгоритмы:
private boolean isConvex1(int[] x, int[] y, int base, int n) // Rory Daulton
{
final double TWO_PI = 2 * Math.PI;
// points is 'strictly convex': points are valid, side lengths non-zero, interior angles are strictly between zero and a straight
// angle, and the polygon does not intersect itself.
// NOTES: 1. Algorithm: the signed changes of the direction angles from one side to the next side must be all positive or
// all negative, and their sum must equal plus-or-minus one full turn (2 pi radians). Also check for too few,
// invalid, or repeated points.
// 2. No check is explicitly done for zero internal angles(180 degree direction-change angle) as this is covered
// in other ways, including the `n < 3` check.
// needed for any bad points or direction changes
// Check for too few points
if (n <= 3) return true;
if (x[base] == x[n-1] && y[base] == y[n-1]) // if its a closed polygon, ignore last vertex
n--;
// Get starting information
int old_x = x[n-2], old_y = y[n-2];
int new_x = x[n-1], new_y = y[n-1];
double new_direction = Math.atan2(new_y - old_y, new_x - old_x), old_direction;
double angle_sum = 0.0, orientation=0;
// Check each point (the side ending there, its angle) and accum. angles for ndx, newpoint in enumerate(polygon):
for (int i = 0; i < n; i++)
{
// Update point coordinates and side directions, check side length
old_x = new_x; old_y = new_y; old_direction = new_direction;
int p = base++;
new_x = x[p]; new_y = y[p];
new_direction = Math.atan2(new_y - old_y, new_x - old_x);
if (old_x == new_x && old_y == new_y)
return false; // repeated consecutive points
// Calculate & check the normalized direction-change angle
double angle = new_direction - old_direction;
if (angle <= -Math.PI)
angle += TWO_PI; // make it in half-open interval (-Pi, Pi]
else if (angle > Math.PI)
angle -= TWO_PI;
if (i == 0) // if first time through loop, initialize orientation
{
if (angle == 0.0) return false;
orientation = angle > 0 ? 1 : -1;
}
else // if other time through loop, check orientation is stable
if (orientation * angle <= 0) // not both pos. or both neg.
return false;
// Accumulate the direction-change angle
angle_sum += angle;
// Check that the total number of full turns is plus-or-minus 1
}
return Math.abs(Math.round(angle_sum / TWO_PI)) == 1;
}
а теперь от Ури Горена
private boolean isConvex2(int[] x, int[] y, int base, int n)
{
if (n < 4)
return true;
boolean sign = false;
if (x[base] == x[n-1] && y[base] == y[n-1]) // if its a closed polygon, ignore last vertex
n--;
for(int p=0; p < n; p++)
{
int i = base++;
int i1 = i+1; if (i1 >= n) i1 = base + i1-n;
int i2 = i+2; if (i2 >= n) i2 = base + i2-n;
int dx1 = x[i1] - x[i];
int dy1 = y[i1] - y[i];
int dx2 = x[i2] - x[i1];
int dy2 = y[i2] - y[i1];
int crossproduct = dx1*dy2 - dy1*dx2;
if (i == base)
sign = crossproduct > 0;
else
if (sign != (crossproduct > 0))
return false;
}
return true;
}
этот метод будет работать на простых полигонах (без самопересекающихся ребер), предполагая, что вершины упорядочены (по часовой стрелке или против)
для массива вершин:
vertices = [(0,0),(1,0),(1,1),(0,1)]
следующее python реализация проверяет, является ли z компонент всех перекрестных продуктов имеет такой же знак
def zCrossProduct(a,b,c):
return (a[0]-b[0])*(b[1]-c[1])-(a[1]-b[1])*(b[0]-c[0])
def isConvex(vertices):
if len(vertices)<4:
return True
signs= [zCrossProduct(a,b,c)>0 for a,b,c in zip(vertices[2:],vertices[1:],vertices)]
return all(signs) or not any(signs)
адаптированный код Uri в matlab. Надеюсь, это поможет.
имейте в виду, что алгоритм Uri работает только для простые многоугольники! Итак, не забудьте сначала проверить, прост ли многоугольник!
% M [ x1 x2 x3 ...
% y1 y2 y3 ...]
% test if a polygon is convex
function ret = isConvex(M)
N = size(M,2);
if (N<4)
ret = 1;
return;
end
x0 = M(1, 1:end);
x1 = [x0(2:end), x0(1)];
x2 = [x0(3:end), x0(1:2)];
y0 = M(2, 1:end);
y1 = [y0(2:end), y0(1)];
y2 = [y0(3:end), y0(1:2)];
dx1 = x2 - x1;
dy1 = y2 - y1;
dx2 = x0 - x1;
dy2 = y0 - y1;
zcrossproduct = dx1 .* dy2 - dy1 .* dx2;
% equality allows two consecutive edges to be parallel
t1 = sum(zcrossproduct >= 0);
t2 = sum(zcrossproduct <= 0);
ret = t1 == N || t2 == N;
end