Как обнаружить рождественскую елку?
какие методы обработки изображений можно использовать для реализации приложения, которое обнаруживает елки, отображаемые на следующих изображениях?






Я ищу решения, которые будут работать на все эти образы. Поэтому подходы, требующие обучения классификаторы каскада Хаара или согласование шаблона не очень интересный.
Я ищу что-то, что можно написать в любой язык программирования, пока он использует только Открыть Источник технологии. Решение должно быть протестировано с изображениями, которые совместно используются в этом вопросе. Есть 6 входных изображений и ответ должен отобразить результаты обработки каждого из них. Наконец, для каждого вывод изображения должно быть красные линии draw to окружите обнаруженное дерево.
Как бы вы пошли о программном обнаружении деревьев в этих изображениях?
10 ответов
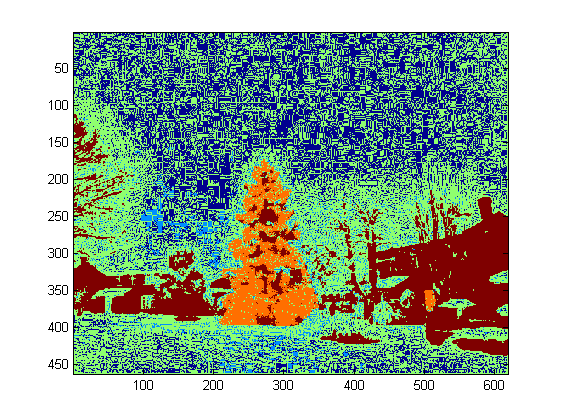
у меня есть подход, который я думаю, немного отличается от остальных. Основное различие в моем подходе, по сравнению с некоторыми другими, заключается в том, как выполняется шаг сегментации изображения-я использовал DBSCAN алгоритм кластеризации из scikit-learn Python; он оптимизирован для поиска несколько аморфных форм, которые могут не обязательно иметь один четкий центроид.
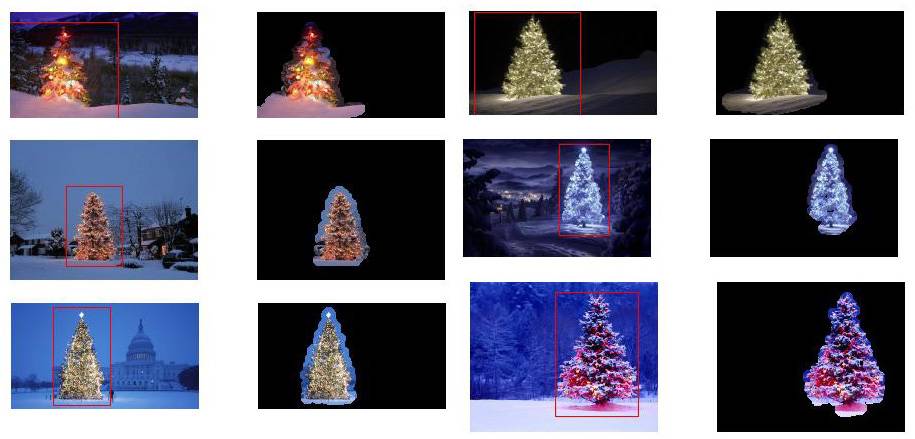
на верхнем уровне мой подход довольно прост и может быть разбит на о 3 шагах. Сначала я применяю порог (или фактически логическое "или" двух отдельных и разных порогов). Как и во многих других ответах, я предположил, что рождественская елка будет одним из самых ярких объектов в сцене, поэтому первый порог-это просто монохромный тест яркости; любые пиксели со значениями выше 220 по шкале 0-255 (где черный-0, а белый-255) сохраняются в двоичном черно-белом изображении. Второй порог пытается искать красные и желтые огни, которые особенно заметны на деревьях в верхнем левом и нижнем правом углу шести изображений и хорошо выделяются на сине-зеленом фоне, который преобладает на большинстве фотографий. Я преобразую изображение rgb в пространство hsv и требую, чтобы оттенок был либо меньше 0,2 по шкале 0,0-1,0 (что примерно соответствует границе между желтым и зеленым), либо больше 0,95 (что соответствует границе между фиолетовым и красным), и дополнительно я требую ярких насыщенных цветов: насыщенность и значение должны быть выше 0,7. Результаты двух пороговых процедур логически " или " - Ред вместе, и результирующая матрица черно-белых двоичных изображений показана ниже:
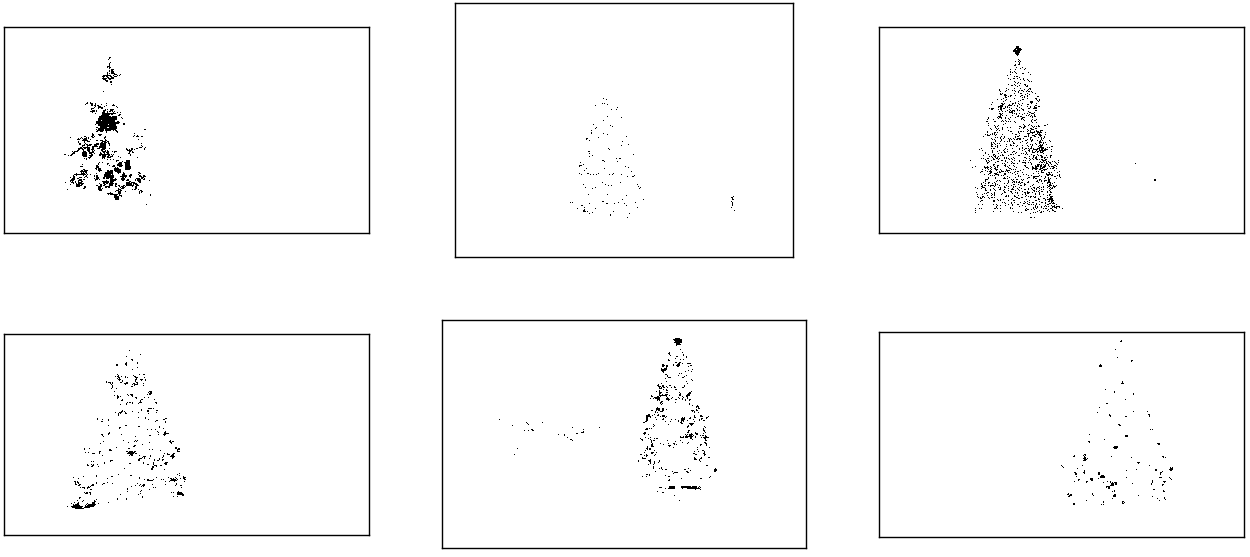
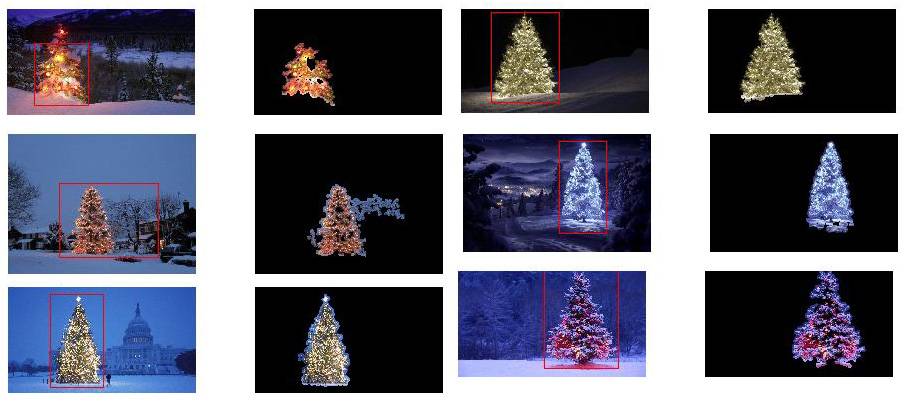
вы можете ясно видеть, что каждое изображение имеет один большой кластер пикселей, примерно соответствующий местоположению каждого дерева, плюс несколько изображений также имеют некоторые другие небольшие кластеры, соответствующие либо огням в окнах некоторых зданий, либо фоновая сцена на горизонте. Следующий шаг - заставить компьютер распознать, что это отдельные кластеры, и правильно пометить каждый пиксель идентификатором членства в кластере.
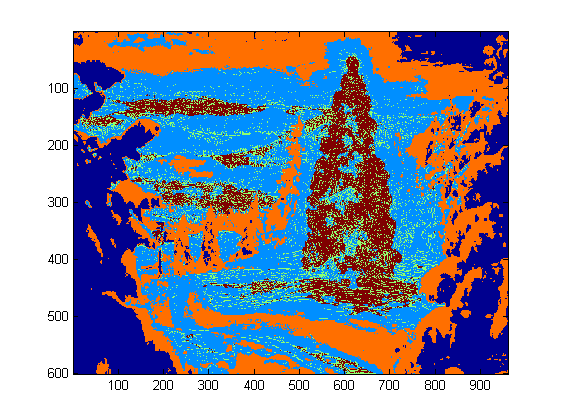
для этой задачи я выбрал DBSCAN. Существует довольно хорошее визуальное сравнение того, как DBSCAN обычно ведет себя по отношению к другим алгоритмам кластеризации, доступным здесь. Как я уже говорил, он хорошо справляется с аморфными формами. Выход DBSCAN, с каждым кластером нанесенный другим цветом, показан здесь:
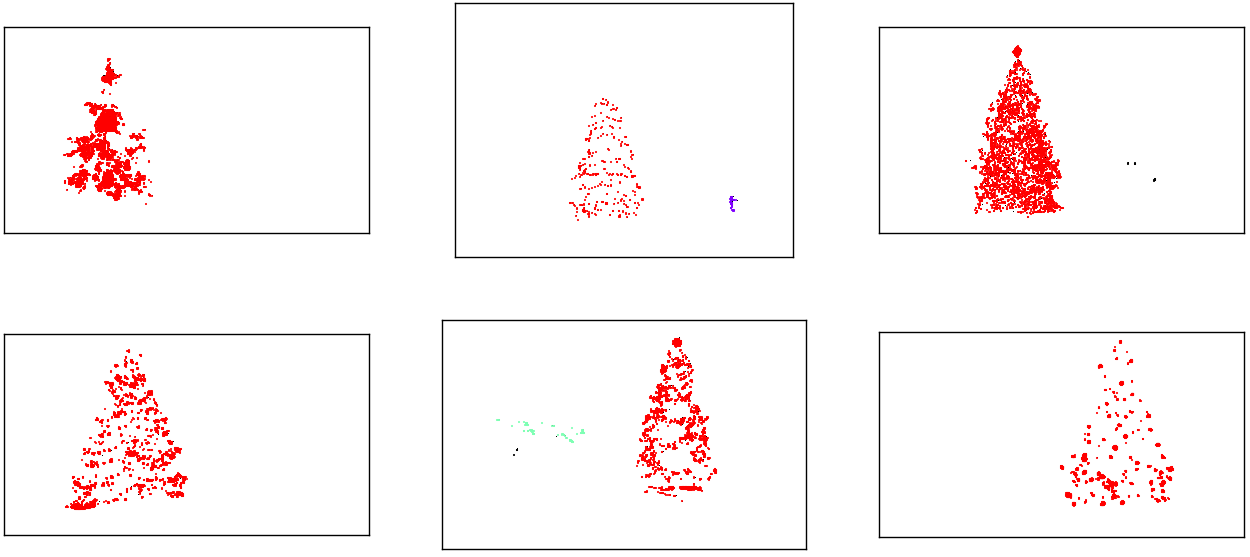
есть несколько вещей, которые нужно знать, глядя на этот результат. Во-первых, DBSCAN требует от пользователя установить параметр "proximity" для регулирования его поведения, который эффективно управляет тем, как должна быть разделена пара точек, чтобы алгоритм мог объявить новый отдельный кластер, а не агломерировать тестовую точку на уже существующий кластер. Я установил это значение 0.04 раз размер по диагонали каждого изображения. Поскольку размер изображений варьируется от примерно VGA до примерно HD 1080, этот тип масштабного определения имеет решающее значение.
еще один момент, который стоит отметить, заключается в том, что алгоритм DBSCAN, реализованный в scikit-learn, имеет ограничения памяти, которые довольно сложны для некоторых больших изображений в этом примере. Поэтому для нескольких больших изображений мне фактически пришлось "уничтожить" (т. е. сохранить только каждый 3-й или 4-й пиксель и падение остальные) каждый кластер, чтобы оставаться в пределах этого предела. В результате этого процесса отбраковки оставшиеся отдельные разреженные пиксели трудно увидеть на некоторых больших изображениях. Поэтому, только для целей отображения, цветные пиксели в приведенных выше изображениях были эффективно "расширены" немного, чтобы они выделялись лучше. Это чисто косметическая операция ради повествования; хотя есть комментарии, упоминающие об этом расширении в моем коде, будьте уверены, что это не имеет ничего общего с расчетами, которые действительно имеют значение.
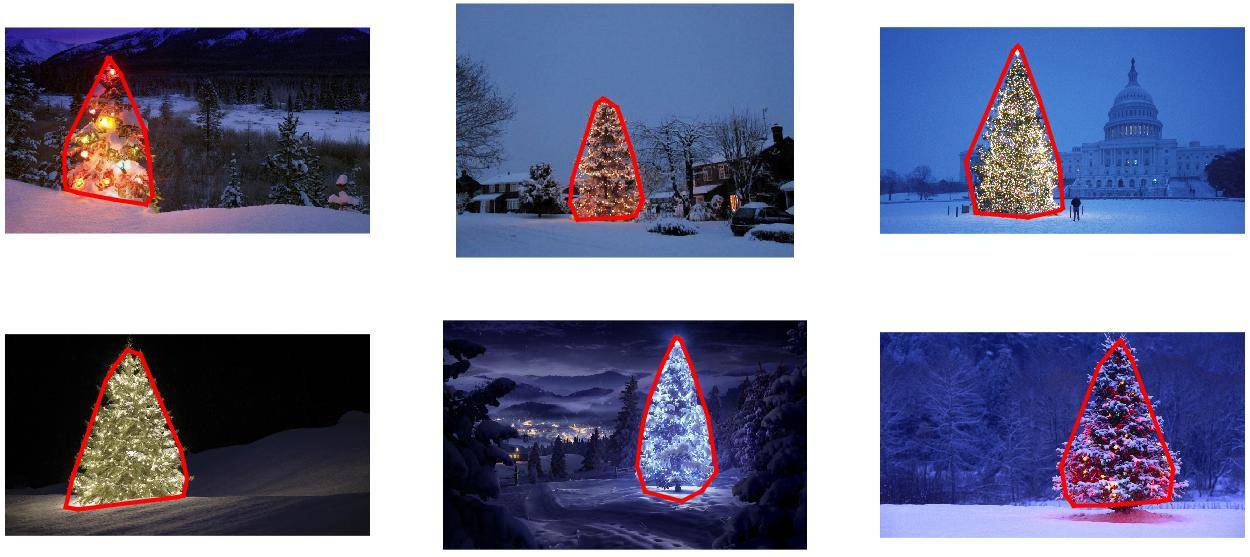
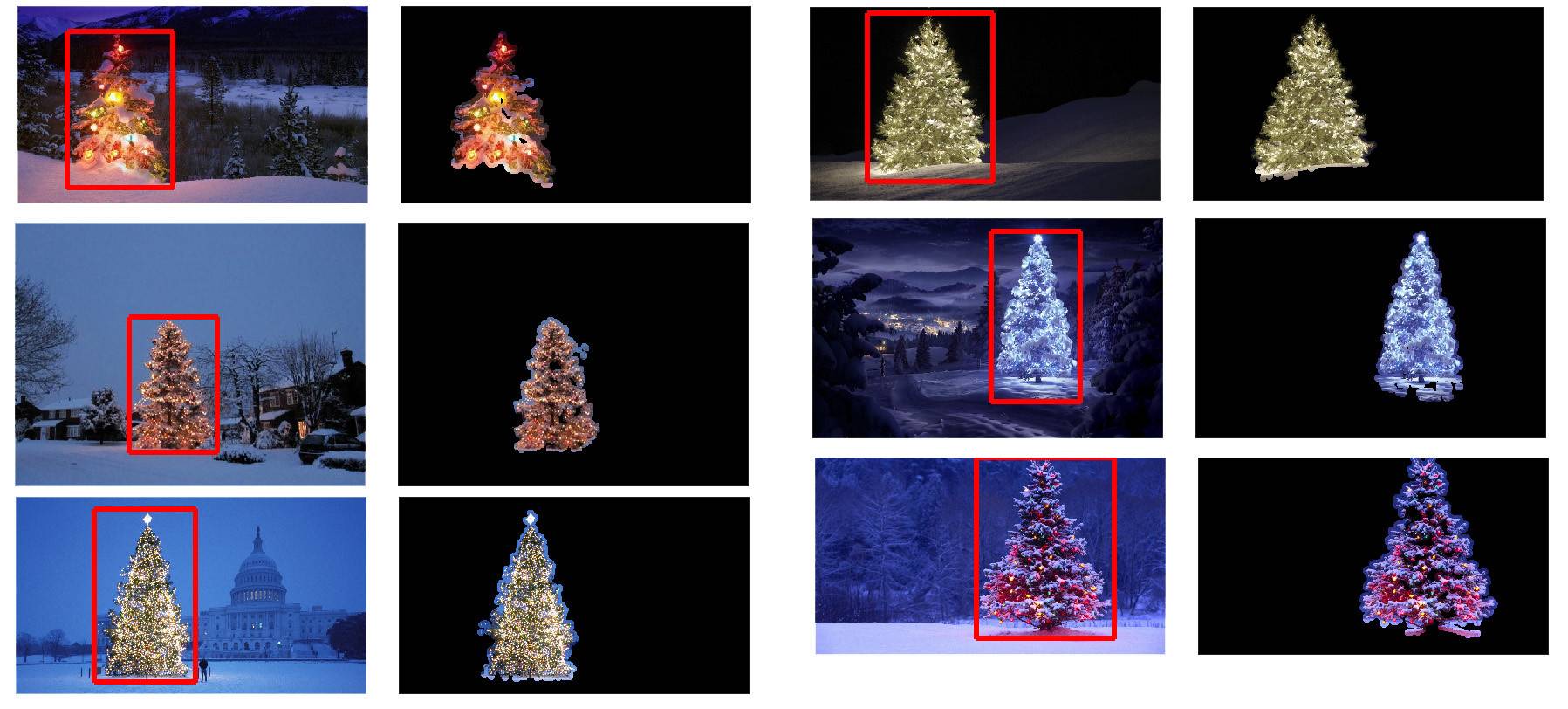
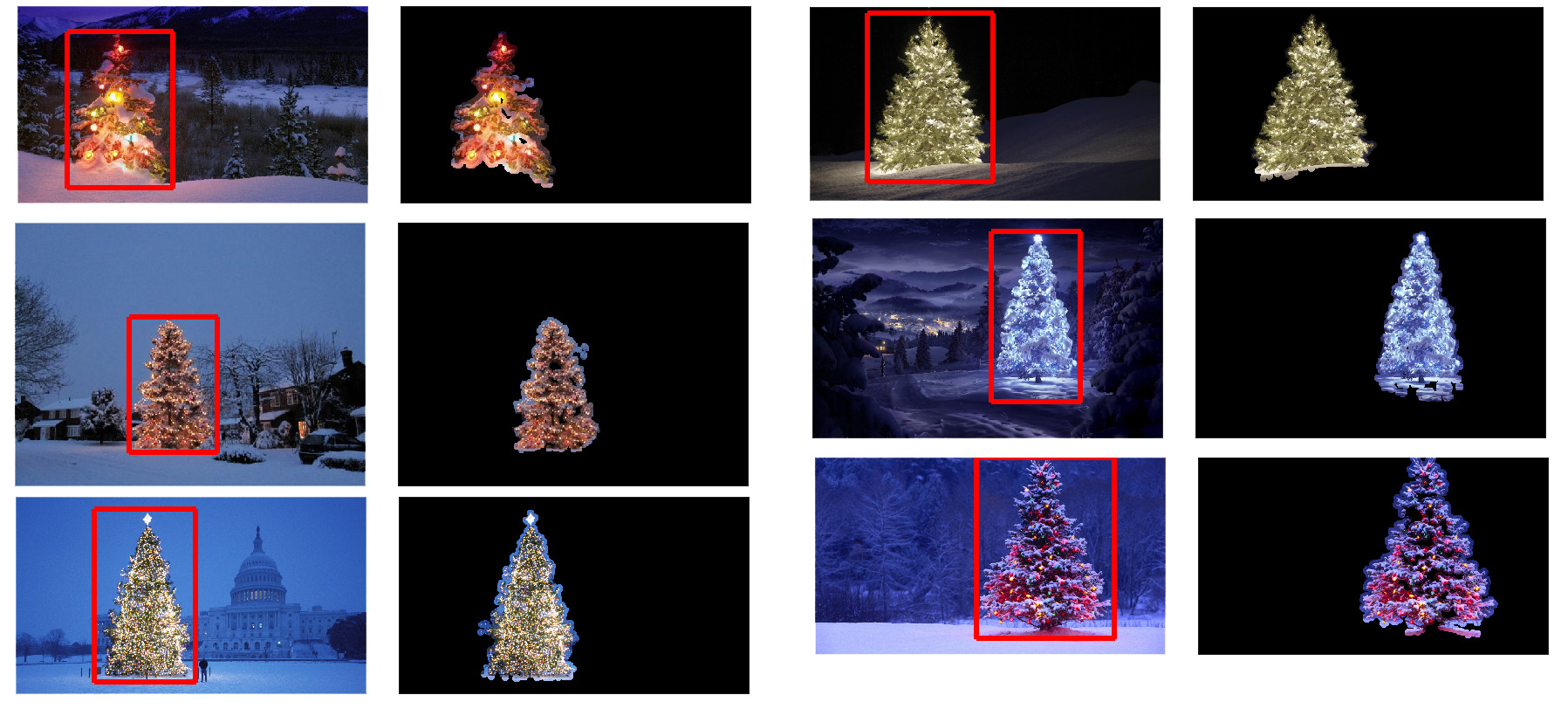
Как только кластеры идентифицированы и помечены, третий и последний шаг прост: я просто беру самый большой кластер в каждом изображении (в этом случае я решил измерить "размер" в терминах общего количества пикселей-членов, хотя можно было бы так же легко вместо этого использовать какой-то тип метрики, который измеряет физический экстент) и вычислить выпуклую оболочку для этого кластера. Выпуклая оболочка становится границей дерева. Шестерка выпуклые корпуса, вычисленные с помощью этого метода, показаны ниже красным цветом:
исходный код написан для Python 2.7.6 и зависит это включает в себя, scipy, библиотек matplotlib и scikit-learn. Я разделил его на две части. Первая часть отвечает за фактическую обработку изображений:
from PIL import Image
import numpy as np
import scipy as sp
import matplotlib.colors as colors
from sklearn.cluster import DBSCAN
from math import ceil, sqrt
"""
Inputs:
rgbimg: [M,N,3] numpy array containing (uint, 0-255) color image
hueleftthr: Scalar constant to select maximum allowed hue in the
yellow-green region
huerightthr: Scalar constant to select minimum allowed hue in the
blue-purple region
satthr: Scalar constant to select minimum allowed saturation
valthr: Scalar constant to select minimum allowed value
monothr: Scalar constant to select minimum allowed monochrome
brightness
maxpoints: Scalar constant maximum number of pixels to forward to
the DBSCAN clustering algorithm
proxthresh: Proximity threshold to use for DBSCAN, as a fraction of
the diagonal size of the image
Outputs:
borderseg: [K,2,2] Nested list containing K pairs of x- and y- pixel
values for drawing the tree border
X: [P,2] List of pixels that passed the threshold step
labels: [Q,2] List of cluster labels for points in Xslice (see
below)
Xslice: [Q,2] Reduced list of pixels to be passed to DBSCAN
"""
def findtree(rgbimg, hueleftthr=0.2, huerightthr=0.95, satthr=0.7,
valthr=0.7, monothr=220, maxpoints=5000, proxthresh=0.04):
# Convert rgb image to monochrome for
gryimg = np.asarray(Image.fromarray(rgbimg).convert('L'))
# Convert rgb image (uint, 0-255) to hsv (float, 0.0-1.0)
hsvimg = colors.rgb_to_hsv(rgbimg.astype(float)/255)
# Initialize binary thresholded image
binimg = np.zeros((rgbimg.shape[0], rgbimg.shape[1]))
# Find pixels with hue<0.2 or hue>0.95 (red or yellow) and saturation/value
# both greater than 0.7 (saturated and bright)--tends to coincide with
# ornamental lights on trees in some of the images
boolidx = np.logical_and(
np.logical_and(
np.logical_or((hsvimg[:,:,0] < hueleftthr),
(hsvimg[:,:,0] > huerightthr)),
(hsvimg[:,:,1] > satthr)),
(hsvimg[:,:,2] > valthr))
# Find pixels that meet hsv criterion
binimg[np.where(boolidx)] = 255
# Add pixels that meet grayscale brightness criterion
binimg[np.where(gryimg > monothr)] = 255
# Prepare thresholded points for DBSCAN clustering algorithm
X = np.transpose(np.where(binimg == 255))
Xslice = X
nsample = len(Xslice)
if nsample > maxpoints:
# Make sure number of points does not exceed DBSCAN maximum capacity
Xslice = X[range(0,nsample,int(ceil(float(nsample)/maxpoints)))]
# Translate DBSCAN proximity threshold to units of pixels and run DBSCAN
pixproxthr = proxthresh * sqrt(binimg.shape[0]**2 + binimg.shape[1]**2)
db = DBSCAN(eps=pixproxthr, min_samples=10).fit(Xslice)
labels = db.labels_.astype(int)
# Find the largest cluster (i.e., with most points) and obtain convex hull
unique_labels = set(labels)
maxclustpt = 0
for k in unique_labels:
class_members = [index[0] for index in np.argwhere(labels == k)]
if len(class_members) > maxclustpt:
points = Xslice[class_members]
hull = sp.spatial.ConvexHull(points)
maxclustpt = len(class_members)
borderseg = [[points[simplex,0], points[simplex,1]] for simplex
in hull.simplices]
return borderseg, X, labels, Xslice
а вторая часть-это скрипт пользовательского уровня, который вызывает первый файл и генерирует все выше участков:
#!/usr/bin/env python
from PIL import Image
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.cm as cm
from findtree import findtree
# Image files to process
fname = ['nmzwj.png', 'aVZhC.png', '2K9EF.png',
'YowlH.png', '2y4o5.png', 'FWhSP.png']
# Initialize figures
fgsz = (16,7)
figthresh = plt.figure(figsize=fgsz, facecolor='w')
figclust = plt.figure(figsize=fgsz, facecolor='w')
figcltwo = plt.figure(figsize=fgsz, facecolor='w')
figborder = plt.figure(figsize=fgsz, facecolor='w')
figthresh.canvas.set_window_title('Thresholded HSV and Monochrome Brightness')
figclust.canvas.set_window_title('DBSCAN Clusters (Raw Pixel Output)')
figcltwo.canvas.set_window_title('DBSCAN Clusters (Slightly Dilated for Display)')
figborder.canvas.set_window_title('Trees with Borders')
for ii, name in zip(range(len(fname)), fname):
# Open the file and convert to rgb image
rgbimg = np.asarray(Image.open(name))
# Get the tree borders as well as a bunch of other intermediate values
# that will be used to illustrate how the algorithm works
borderseg, X, labels, Xslice = findtree(rgbimg)
# Display thresholded images
axthresh = figthresh.add_subplot(2,3,ii+1)
axthresh.set_xticks([])
axthresh.set_yticks([])
binimg = np.zeros((rgbimg.shape[0], rgbimg.shape[1]))
for v, h in X:
binimg[v,h] = 255
axthresh.imshow(binimg, interpolation='nearest', cmap='Greys')
# Display color-coded clusters
axclust = figclust.add_subplot(2,3,ii+1) # Raw version
axclust.set_xticks([])
axclust.set_yticks([])
axcltwo = figcltwo.add_subplot(2,3,ii+1) # Dilated slightly for display only
axcltwo.set_xticks([])
axcltwo.set_yticks([])
axcltwo.imshow(binimg, interpolation='nearest', cmap='Greys')
clustimg = np.ones(rgbimg.shape)
unique_labels = set(labels)
# Generate a unique color for each cluster
plcol = cm.rainbow_r(np.linspace(0, 1, len(unique_labels)))
for lbl, pix in zip(labels, Xslice):
for col, unqlbl in zip(plcol, unique_labels):
if lbl == unqlbl:
# Cluster label of -1 indicates no cluster membership;
# override default color with black
if lbl == -1:
col = [0.0, 0.0, 0.0, 1.0]
# Raw version
for ij in range(3):
clustimg[pix[0],pix[1],ij] = col[ij]
# Dilated just for display
axcltwo.plot(pix[1], pix[0], 'o', markerfacecolor=col,
markersize=1, markeredgecolor=col)
axclust.imshow(clustimg)
axcltwo.set_xlim(0, binimg.shape[1]-1)
axcltwo.set_ylim(binimg.shape[0], -1)
# Plot original images with read borders around the trees
axborder = figborder.add_subplot(2,3,ii+1)
axborder.set_axis_off()
axborder.imshow(rgbimg, interpolation='nearest')
for vseg, hseg in borderseg:
axborder.plot(hseg, vseg, 'r-', lw=3)
axborder.set_xlim(0, binimg.shape[1]-1)
axborder.set_ylim(binimg.shape[0], -1)
plt.show()
ИЗМЕНИТЬ ПРИМЕЧАНИЕ: я отредактировал это сообщение, чтобы (i) обработать каждое изображение дерева индивидуально, как это требуется в требованиях, (ii) рассмотреть яркость и форму объекта, чтобы улучшить качество результата.
Ниже представлен подход, который учитывает яркость и форму объекта. Другими словами, он ищет объекты с треугольной формой и значительной яркостью. Он был реализован на Java, используя Марвин основы обработки изображений.
первый шаг-это цветовой порог. Цель здесь состоит в том, чтобы сфокусировать анализ на объектах со значительной яркостью.
выход изображения:
http://marvinproject.sourceforge.net/other/trees/tree_1threshold.png http://marvinproject.sourceforge.net/other/trees/tree_2threshold.png http://marvinproject.sourceforge.net/other/trees/tree_3threshold.png
{kind=link}
{kind=link}
{kind=link}
http://marvinproject.sourceforge.net/other/trees/tree_4threshold.png http://marvinproject.sourceforge.net/other/trees/tree_5threshold.png http://marvinproject.sourceforge.net/other/trees/tree_6threshold.png
{kind=link}
{kind=link}
{kind=link}
источник код:
public class ChristmasTree {
private MarvinImagePlugin fill = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.fill.boundaryFill");
private MarvinImagePlugin threshold = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.thresholding");
private MarvinImagePlugin invert = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.invert");
private MarvinImagePlugin dilation = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.morphological.dilation");
public ChristmasTree(){
MarvinImage tree;
// Iterate each image
for(int i=1; i<=6; i++){
tree = MarvinImageIO.loadImage("./res/trees/tree"+i+".png");
// 1. Threshold
threshold.setAttribute("threshold", 200);
threshold.process(tree.clone(), tree);
}
}
public static void main(String[] args) {
new ChristmasTree();
}
}
на втором шаге самые яркие точки На изображении расширяются, чтобы сформировать фигуры. Результатом этого процесса является вероятная форма объектов со значительной яркостью. Применяя сегментацию заливки потока, обнаруживаются отключенные фигуры.
выход изображения:
http://marvinproject.sourceforge.net/other/trees/tree_1_fill.png http://marvinproject.sourceforge.net/other/trees/tree_2_fill.png http://marvinproject.sourceforge.net/other/trees/tree_3_fill.png
{kind=link}
{kind=link}
{kind=link}
http://marvinproject.sourceforge.net/other/trees/tree_4_fill.png http://marvinproject.sourceforge.net/other/trees/tree_5_fill.png http://marvinproject.sourceforge.net/other/trees/tree_6_fill.png
{kind=link}
{kind=link}
{kind=link}
источник код:
public class ChristmasTree {
private MarvinImagePlugin fill = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.fill.boundaryFill");
private MarvinImagePlugin threshold = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.thresholding");
private MarvinImagePlugin invert = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.invert");
private MarvinImagePlugin dilation = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.morphological.dilation");
public ChristmasTree(){
MarvinImage tree;
// Iterate each image
for(int i=1; i<=6; i++){
tree = MarvinImageIO.loadImage("./res/trees/tree"+i+".png");
// 1. Threshold
threshold.setAttribute("threshold", 200);
threshold.process(tree.clone(), tree);
// 2. Dilate
invert.process(tree.clone(), tree);
tree = MarvinColorModelConverter.rgbToBinary(tree, 127);
MarvinImageIO.saveImage(tree, "./res/trees/new/tree_"+i+"threshold.png");
dilation.setAttribute("matrix", MarvinMath.getTrueMatrix(50, 50));
dilation.process(tree.clone(), tree);
MarvinImageIO.saveImage(tree, "./res/trees/new/tree_"+1+"_dilation.png");
tree = MarvinColorModelConverter.binaryToRgb(tree);
// 3. Segment shapes
MarvinImage trees2 = tree.clone();
fill(tree, trees2);
MarvinImageIO.saveImage(trees2, "./res/trees/new/tree_"+i+"_fill.png");
}
private void fill(MarvinImage imageIn, MarvinImage imageOut){
boolean found;
int color= 0xFFFF0000;
while(true){
found=false;
Outerloop:
for(int y=0; y<imageIn.getHeight(); y++){
for(int x=0; x<imageIn.getWidth(); x++){
if(imageOut.getIntComponent0(x, y) == 0){
fill.setAttribute("x", x);
fill.setAttribute("y", y);
fill.setAttribute("color", color);
fill.setAttribute("threshold", 120);
fill.process(imageIn, imageOut);
color = newColor(color);
found = true;
break Outerloop;
}
}
}
if(!found){
break;
}
}
}
private int newColor(int color){
int red = (color & 0x00FF0000) >> 16;
int green = (color & 0x0000FF00) >> 8;
int blue = (color & 0x000000FF);
if(red <= green && red <= blue){
red+=5;
}
else if(green <= red && green <= blue){
green+=5;
}
else{
blue+=5;
}
return 0xFF000000 + (red << 16) + (green << 8) + blue;
}
public static void main(String[] args) {
new ChristmasTree();
}
}
как показано на изображении, было обнаружено несколько фигур. В этой проблеме есть всего несколько ярких точек на изображениях. Однако этот подход был реализован для решения более сложных сценариев.
на следующем шаге каждая фигура анализируется. Простой алгоритм обнаруживает фигуры с рисунком, похожим на треугольник. Алгоритм анализирует форму объекта строка за строкой. Если центр массы каждой линии формы почти одинаков (учитывая, что порог) и увеличение массы по мере увеличения y объект имеет треугольную форму. Масса линии фигуры - это количество пикселей в этой линии, которая принадлежит фигуре. Представьте, что вы разрезаете объект по горизонтали и анализируете каждый горизонтальный сегмент. Если они централизованы друг к другу и длина увеличивается от первого сегмента до последнего в линейном шаблоне, у вас, вероятно, есть объект, похожий на треугольник.
источник код:
private int[] detectTrees(MarvinImage image){
HashSet<Integer> analysed = new HashSet<Integer>();
boolean found;
while(true){
found = false;
for(int y=0; y<image.getHeight(); y++){
for(int x=0; x<image.getWidth(); x++){
int color = image.getIntColor(x, y);
if(!analysed.contains(color)){
if(isTree(image, color)){
return getObjectRect(image, color);
}
analysed.add(color);
found=true;
}
}
}
if(!found){
break;
}
}
return null;
}
private boolean isTree(MarvinImage image, int color){
int mass[][] = new int[image.getHeight()][2];
int yStart=-1;
int xStart=-1;
for(int y=0; y<image.getHeight(); y++){
int mc = 0;
int xs=-1;
int xe=-1;
for(int x=0; x<image.getWidth(); x++){
if(image.getIntColor(x, y) == color){
mc++;
if(yStart == -1){
yStart=y;
xStart=x;
}
if(xs == -1){
xs = x;
}
if(x > xe){
xe = x;
}
}
}
mass[y][0] = xs;
mass[y][3] = xe;
mass[y][4] = mc;
}
int validLines=0;
for(int y=0; y<image.getHeight(); y++){
if
(
mass[y][5] > 0 &&
Math.abs(((mass[y][0]+mass[y][6])/2)-xStart) <= 50 &&
mass[y][7] >= (mass[yStart][8] + (y-yStart)*0.3) &&
mass[y][9] <= (mass[yStart][10] + (y-yStart)*1.5)
)
{
validLines++;
}
}
if(validLines > 100){
return true;
}
return false;
}
наконец, положение каждой фигуры, похожей на треугольник и со значительной яркостью, в этом случае Рождественская елка, подсвечивается на исходном изображении, как показано ниже.
конечный результат изображения:
http://marvinproject.sourceforge.net/other/trees/tree_1_out_2.jpg http://marvinproject.sourceforge.net/other/trees/tree_2_out_2.jpg http://marvinproject.sourceforge.net/other/trees/tree_3_out_2.jpg
{kind=link}
{kind=link}
{kind=link}
http://marvinproject.sourceforge.net/other/trees/tree_4_out_2.jpg http://marvinproject.sourceforge.net/other/trees/tree_5_out_2.jpg http://marvinproject.sourceforge.net/other/trees/tree_6_out_2.jpg
{kind=link}
{kind=link}
{kind=link}
финал исходный код:
public class ChristmasTree {
private MarvinImagePlugin fill = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.fill.boundaryFill");
private MarvinImagePlugin threshold = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.thresholding");
private MarvinImagePlugin invert = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.color.invert");
private MarvinImagePlugin dilation = MarvinPluginLoader.loadImagePlugin("org.marvinproject.image.morphological.dilation");
public ChristmasTree(){
MarvinImage tree;
// Iterate each image
for(int i=1; i<=6; i++){
tree = MarvinImageIO.loadImage("./res/trees/tree"+i+".png");
// 1. Threshold
threshold.setAttribute("threshold", 200);
threshold.process(tree.clone(), tree);
// 2. Dilate
invert.process(tree.clone(), tree);
tree = MarvinColorModelConverter.rgbToBinary(tree, 127);
MarvinImageIO.saveImage(tree, "./res/trees/new/tree_"+i+"threshold.png");
dilation.setAttribute("matrix", MarvinMath.getTrueMatrix(50, 50));
dilation.process(tree.clone(), tree);
MarvinImageIO.saveImage(tree, "./res/trees/new/tree_"+1+"_dilation.png");
tree = MarvinColorModelConverter.binaryToRgb(tree);
// 3. Segment shapes
MarvinImage trees2 = tree.clone();
fill(tree, trees2);
MarvinImageIO.saveImage(trees2, "./res/trees/new/tree_"+i+"_fill.png");
// 4. Detect tree-like shapes
int[] rect = detectTrees(trees2);
// 5. Draw the result
MarvinImage original = MarvinImageIO.loadImage("./res/trees/tree"+i+".png");
drawBoundary(trees2, original, rect);
MarvinImageIO.saveImage(original, "./res/trees/new/tree_"+i+"_out_2.jpg");
}
}
private void drawBoundary(MarvinImage shape, MarvinImage original, int[] rect){
int yLines[] = new int[6];
yLines[0] = rect[1];
yLines[1] = rect[1]+(int)((rect[3]/5));
yLines[2] = rect[1]+((rect[3]/5)*2);
yLines[3] = rect[1]+((rect[3]/5)*3);
yLines[4] = rect[1]+(int)((rect[3]/5)*4);
yLines[5] = rect[1]+rect[3];
List<Point> points = new ArrayList<Point>();
for(int i=0; i<yLines.length; i++){
boolean in=false;
Point startPoint=null;
Point endPoint=null;
for(int x=rect[0]; x<rect[0]+rect[2]; x++){
if(shape.getIntColor(x, yLines[i]) != 0xFFFFFFFF){
if(!in){
if(startPoint == null){
startPoint = new Point(x, yLines[i]);
}
}
in = true;
}
else{
if(in){
endPoint = new Point(x, yLines[i]);
}
in = false;
}
}
if(endPoint == null){
endPoint = new Point((rect[0]+rect[2])-1, yLines[i]);
}
points.add(startPoint);
points.add(endPoint);
}
drawLine(points.get(0).x, points.get(0).y, points.get(1).x, points.get(1).y, 15, original);
drawLine(points.get(1).x, points.get(1).y, points.get(3).x, points.get(3).y, 15, original);
drawLine(points.get(3).x, points.get(3).y, points.get(5).x, points.get(5).y, 15, original);
drawLine(points.get(5).x, points.get(5).y, points.get(7).x, points.get(7).y, 15, original);
drawLine(points.get(7).x, points.get(7).y, points.get(9).x, points.get(9).y, 15, original);
drawLine(points.get(9).x, points.get(9).y, points.get(11).x, points.get(11).y, 15, original);
drawLine(points.get(11).x, points.get(11).y, points.get(10).x, points.get(10).y, 15, original);
drawLine(points.get(10).x, points.get(10).y, points.get(8).x, points.get(8).y, 15, original);
drawLine(points.get(8).x, points.get(8).y, points.get(6).x, points.get(6).y, 15, original);
drawLine(points.get(6).x, points.get(6).y, points.get(4).x, points.get(4).y, 15, original);
drawLine(points.get(4).x, points.get(4).y, points.get(2).x, points.get(2).y, 15, original);
drawLine(points.get(2).x, points.get(2).y, points.get(0).x, points.get(0).y, 15, original);
}
private void drawLine(int x1, int y1, int x2, int y2, int length, MarvinImage image){
int lx1, lx2, ly1, ly2;
for(int i=0; i<length; i++){
lx1 = (x1+i >= image.getWidth() ? (image.getWidth()-1)-i: x1);
lx2 = (x2+i >= image.getWidth() ? (image.getWidth()-1)-i: x2);
ly1 = (y1+i >= image.getHeight() ? (image.getHeight()-1)-i: y1);
ly2 = (y2+i >= image.getHeight() ? (image.getHeight()-1)-i: y2);
image.drawLine(lx1+i, ly1, lx2+i, ly2, Color.red);
image.drawLine(lx1, ly1+i, lx2, ly2+i, Color.red);
}
}
private void fillRect(MarvinImage image, int[] rect, int length){
for(int i=0; i<length; i++){
image.drawRect(rect[0]+i, rect[1]+i, rect[2]-(i*2), rect[3]-(i*2), Color.red);
}
}
private void fill(MarvinImage imageIn, MarvinImage imageOut){
boolean found;
int color= 0xFFFF0000;
while(true){
found=false;
Outerloop:
for(int y=0; y<imageIn.getHeight(); y++){
for(int x=0; x<imageIn.getWidth(); x++){
if(imageOut.getIntComponent0(x, y) == 0){
fill.setAttribute("x", x);
fill.setAttribute("y", y);
fill.setAttribute("color", color);
fill.setAttribute("threshold", 120);
fill.process(imageIn, imageOut);
color = newColor(color);
found = true;
break Outerloop;
}
}
}
if(!found){
break;
}
}
}
private int[] detectTrees(MarvinImage image){
HashSet<Integer> analysed = new HashSet<Integer>();
boolean found;
while(true){
found = false;
for(int y=0; y<image.getHeight(); y++){
for(int x=0; x<image.getWidth(); x++){
int color = image.getIntColor(x, y);
if(!analysed.contains(color)){
if(isTree(image, color)){
return getObjectRect(image, color);
}
analysed.add(color);
found=true;
}
}
}
if(!found){
break;
}
}
return null;
}
private boolean isTree(MarvinImage image, int color){
int mass[][] = new int[image.getHeight()][11];
int yStart=-1;
int xStart=-1;
for(int y=0; y<image.getHeight(); y++){
int mc = 0;
int xs=-1;
int xe=-1;
for(int x=0; x<image.getWidth(); x++){
if(image.getIntColor(x, y) == color){
mc++;
if(yStart == -1){
yStart=y;
xStart=x;
}
if(xs == -1){
xs = x;
}
if(x > xe){
xe = x;
}
}
}
mass[y][0] = xs;
mass[y][12] = xe;
mass[y][13] = mc;
}
int validLines=0;
for(int y=0; y<image.getHeight(); y++){
if
(
mass[y][14] > 0 &&
Math.abs(((mass[y][0]+mass[y][15])/2)-xStart) <= 50 &&
mass[y][16] >= (mass[yStart][17] + (y-yStart)*0.3) &&
mass[y][18] <= (mass[yStart][19] + (y-yStart)*1.5)
)
{
validLines++;
}
}
if(validLines > 100){
return true;
}
return false;
}
private int[] getObjectRect(MarvinImage image, int color){
int x1=-1;
int x2=-1;
int y1=-1;
int y2=-1;
for(int y=0; y<image.getHeight(); y++){
for(int x=0; x<image.getWidth(); x++){
if(image.getIntColor(x, y) == color){
if(x1 == -1 || x < x1){
x1 = x;
}
if(x2 == -1 || x > x2){
x2 = x;
}
if(y1 == -1 || y < y1){
y1 = y;
}
if(y2 == -1 || y > y2){
y2 = y;
}
}
}
}
return new int[]{x1, y1, (x2-x1), (y2-y1)};
}
private int newColor(int color){
int red = (color & 0x00FF0000) >> 16;
int green = (color & 0x0000FF00) >> 8;
int blue = (color & 0x000000FF);
if(red <= green && red <= blue){
red+=5;
}
else if(green <= red && green <= blue){
green+=30;
}
else{
blue+=30;
}
return 0xFF000000 + (red << 16) + (green << 8) + blue;
}
public static void main(String[] args) {
new ChristmasTree();
}
}
преимущество этого подхода заключается в том, что он, вероятно, будет работать с изображениями, содержащими другие светящиеся объекты, поскольку он анализирует форму объекта.
С Рождеством!
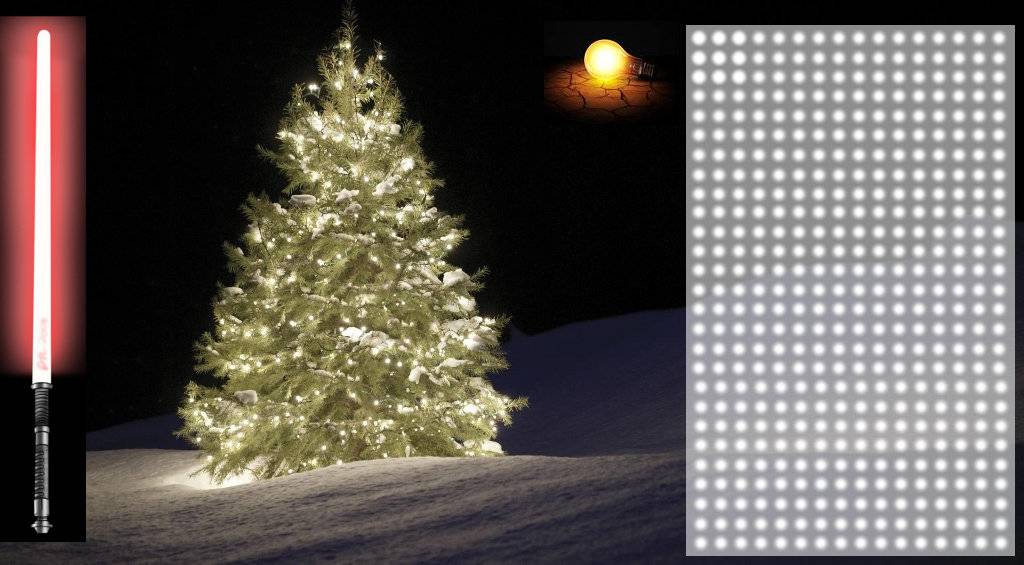
ИЗМЕНИТЬ ПРИМЕЧАНИЕ 2
существует дискуссия о сходстве выходных изображений этого решения и некоторых других. На самом деле они очень похожи. Но этот подход не просто сегментирует объекты. Это также анализирует формы объекта в некотором смысле. Он может обрабатывать несколько светящихся объектов в одной и той же сцене. На самом деле, Рождественская елка не обязательно должна быть самой яркой. Я просто abording обогатить дискуссию. Существует уклон в образцах, что просто ища самый яркий объект, вы найдете деревья. Но, действительно ли мы хотим прекратить обсуждение на этом этапе? На данный момент, как далеко компьютер действительно распознает объект, который напоминает рождественскую елку? Давайте попробуем закрыть этот разрыв.
Ниже представлен результат, чтобы прояснить этот момент:
входного изображения
выход
вот мое простое и тупое решение. Он основан на предположении, что дерево будет самой яркой и большой вещью на картинке.
//g++ -Wall -pedantic -ansi -O2 -pipe -s -o christmas_tree christmas_tree.cpp `pkg-config --cflags --libs opencv`
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc,char *argv[])
{
Mat original,tmp,tmp1;
vector <vector<Point> > contours;
Moments m;
Rect boundrect;
Point2f center;
double radius, max_area=0,tmp_area=0;
unsigned int j, k;
int i;
for(i = 1; i < argc; ++i)
{
original = imread(argv[i]);
if(original.empty())
{
cerr << "Error"<<endl;
return -1;
}
GaussianBlur(original, tmp, Size(3, 3), 0, 0, BORDER_DEFAULT);
erode(tmp, tmp, Mat(), Point(-1, -1), 10);
cvtColor(tmp, tmp, CV_BGR2HSV);
inRange(tmp, Scalar(0, 0, 0), Scalar(180, 255, 200), tmp);
dilate(original, tmp1, Mat(), Point(-1, -1), 15);
cvtColor(tmp1, tmp1, CV_BGR2HLS);
inRange(tmp1, Scalar(0, 185, 0), Scalar(180, 255, 255), tmp1);
dilate(tmp1, tmp1, Mat(), Point(-1, -1), 10);
bitwise_and(tmp, tmp1, tmp1);
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
tmp1 = Mat::zeros(original.size(),CV_8U);
approxPolyDP(contours[j], contours[j], 30, true);
drawContours(tmp1, contours, j, Scalar(255,255,255), CV_FILLED);
m = moments(contours[j]);
boundrect = boundingRect(contours[j]);
center = Point2f(m.m10/m.m00, m.m01/m.m00);
radius = (center.y - (boundrect.tl().y))/4.0*3.0;
Rect heightrect(center.x-original.cols/5, boundrect.tl().y, original.cols/5*2, boundrect.size().height);
tmp = Mat::zeros(original.size(), CV_8U);
rectangle(tmp, heightrect, Scalar(255, 255, 255), -1);
circle(tmp, center, radius, Scalar(255, 255, 255), -1);
bitwise_and(tmp, tmp1, tmp1);
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
approxPolyDP(contours[j], contours[j], 30, true);
convexHull(contours[j], contours[j]);
drawContours(original, contours, j, Scalar(0, 0, 255), 3);
namedWindow(argv[i], CV_WINDOW_NORMAL|CV_WINDOW_KEEPRATIO|CV_GUI_EXPANDED);
imshow(argv[i], original);
waitKey(0);
destroyWindow(argv[i]);
}
return 0;
}
первым шагом является обнаружение самых ярких пикселей на картинке, но мы должны сделать различие между самим деревом и снегом, которые отражают его свет. Здесь мы стараемся исключить снег апплинг очень простой фильтр по цветовым кодам:
GaussianBlur(original, tmp, Size(3, 3), 0, 0, BORDER_DEFAULT);
erode(tmp, tmp, Mat(), Point(-1, -1), 10);
cvtColor(tmp, tmp, CV_BGR2HSV);
inRange(tmp, Scalar(0, 0, 0), Scalar(180, 255, 200), tmp);
тогда мы находим каждый " яркий" пиксель:
dilate(original, tmp1, Mat(), Point(-1, -1), 15);
cvtColor(tmp1, tmp1, CV_BGR2HLS);
inRange(tmp1, Scalar(0, 185, 0), Scalar(180, 255, 255), tmp1);
dilate(tmp1, tmp1, Mat(), Point(-1, -1), 10);
наконец, мы присоединяемся к двум результатам:
bitwise_and(tmp, tmp1, tmp1);
теперь мы ищем самых ярких объекта:
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
tmp1 = Mat::zeros(original.size(),CV_8U);
approxPolyDP(contours[j], contours[j], 30, true);
drawContours(tmp1, contours, j, Scalar(255,255,255), CV_FILLED);
теперь мы почти закончили, но есть еще некоторые недостатки из-за снега. Чтобы отрезать их, мы построим маску, используя круг и прямоугольник, чтобы приблизиться к форме дерева, чтобы удалить ненужные части:
m = moments(contours[j]);
boundrect = boundingRect(contours[j]);
center = Point2f(m.m10/m.m00, m.m01/m.m00);
radius = (center.y - (boundrect.tl().y))/4.0*3.0;
Rect heightrect(center.x-original.cols/5, boundrect.tl().y, original.cols/5*2, boundrect.size().height);
tmp = Mat::zeros(original.size(), CV_8U);
rectangle(tmp, heightrect, Scalar(255, 255, 255), -1);
circle(tmp, center, radius, Scalar(255, 255, 255), -1);
bitwise_and(tmp, tmp1, tmp1);
последний шаг-найти контур нашего дерева и нарисовать его на оригинале изображение.
findContours(tmp1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
max_area = 0;
j = 0;
for(k = 0; k < contours.size(); k++)
{
tmp_area = contourArea(contours[k]);
if(tmp_area > max_area)
{
max_area = tmp_area;
j = k;
}
}
approxPolyDP(contours[j], contours[j], 30, true);
convexHull(contours[j], contours[j]);
drawContours(original, contours, j, Scalar(0, 0, 255), 3);
извините, но на данный момент у меня плохое соединение, поэтому я не могу загружать фотографии. Я попробую сделать это позже.
Счастливого Рождества.
EDIT:
вот некоторые фотографии окончательного вывода:





я написал код в Matlab R2007a. Я использовал k-средства, чтобы грубо извлечь рождественскую елку. Я покажет мой промежуточный результат только с одним изображением, а окончательные результаты со всеми шестью.
во-первых, я сопоставил пространство RGB с лабораторным пространством, что могло бы улучшить контраст красного в его B-канале:
colorTransform = makecform('srgb2lab');
I = applycform(I, colorTransform);
L = double(I(:,:,1));
a = double(I(:,:,2));
b = double(I(:,:,3));
помимо функции в цветовом пространстве, я также использовал функцию текстуры, которая имеет отношение к окрестности, а не каждый пиксель себя. Здесь я линейно объединил интенсивность от 3 оригинальных канала (R,G, B). Причина, почему я отформатирован таким образом, потому что Рождество деревья на картинке все имеют красные огни на них, а иногда зеленый/иногда синий освещение тоже.
R=double(Irgb(:,:,1));
G=double(Irgb(:,:,2));
B=double(Irgb(:,:,3));
I0 = (3*R + max(G,B)-min(G,B))/2;
я применил локальный двоичный шаблон 3X3 на I0, использовал центральный пиксель в качестве порога, и
получен контраст путем вычисления разности между средним значением интенсивности пикселей
выше порога и среднее значение ниже него.
I0_copy = zeros(size(I0));
for i = 2 : size(I0,1) - 1
for j = 2 : size(I0,2) - 1
tmp = I0(i-1:i+1,j-1:j+1) >= I0(i,j);
I0_copy(i,j) = mean(mean(tmp.*I0(i-1:i+1,j-1:j+1))) - ...
mean(mean(~tmp.*I0(i-1:i+1,j-1:j+1))); % Contrast
end
end
поскольку у меня всего 4 функции, я бы выбрал K=5 в моем методе кластеризации. Код для k-средства показаны ниже (это из курса машинного обучения доктора Эндрю Нг. Я взял конечно, раньше, и я сам написал код в своем программном задании).
[centroids, idx] = runkMeans(X, initial_centroids, max_iters);
mask=reshape(idx,img_size(1),img_size(2));
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [centroids, idx] = runkMeans(X, initial_centroids, ...
max_iters, plot_progress)
[m n] = size(X);
K = size(initial_centroids, 1);
centroids = initial_centroids;
previous_centroids = centroids;
idx = zeros(m, 1);
for i=1:max_iters
% For each example in X, assign it to the closest centroid
idx = findClosestCentroids(X, centroids);
% Given the memberships, compute new centroids
centroids = computeCentroids(X, idx, K);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function idx = findClosestCentroids(X, centroids)
K = size(centroids, 1);
idx = zeros(size(X,1), 1);
for xi = 1:size(X,1)
x = X(xi, :);
% Find closest centroid for x.
best = Inf;
for mui = 1:K
mu = centroids(mui, :);
d = dot(x - mu, x - mu);
if d < best
best = d;
idx(xi) = mui;
end
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function centroids = computeCentroids(X, idx, K)
[m n] = size(X);
centroids = zeros(K, n);
for mui = 1:K
centroids(mui, :) = sum(X(idx == mui, :)) / sum(idx == mui);
end

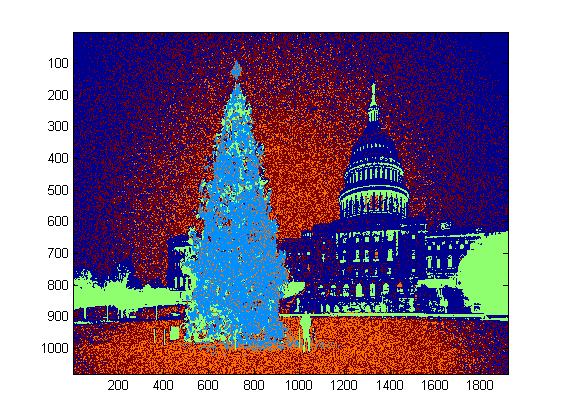
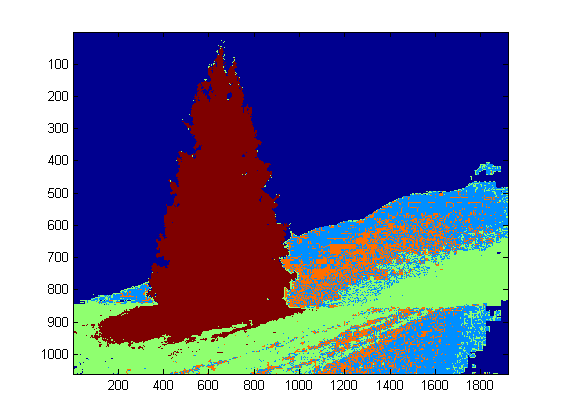

так как программа работает очень медленно на моем компьютер, я только что запустил 3 итерации. Обычно остановка критерием является (i) время итерации не менее 10 или (ii) отсутствие изменений на центроидах. К мой тест, увеличивая итерацию, может различать фон (небо и дерево, небо и здание.,..) точнее, но не показали резких изменений в елке добыча. Также обратите внимание, что k-means не застрахован от случайной инициализации центроида, поэтому рекомендуется несколько раз запускать программу для сравнения.
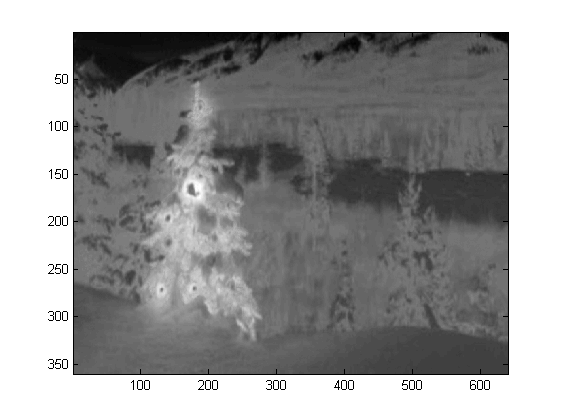
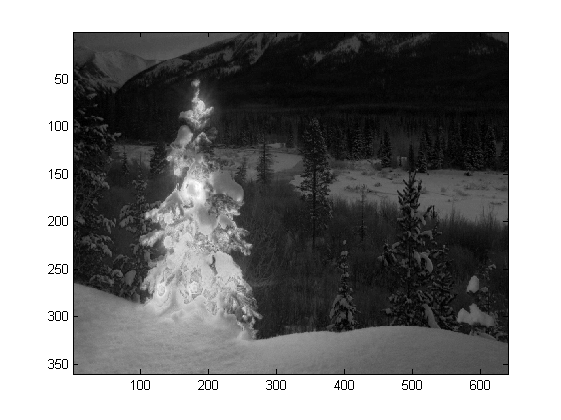
после K-означает помеченную область с максимальной интенсивностью . И
для извлечения границ использовалась трассировка границ. Для меня последняя рождественская елка-самая трудная для извлечения, поскольку контраст на этой картинке недостаточно высок, как в первых пяти. Другая проблема в моем методе заключается в том, что я использовал bwboundaries функция в Matlab для трассировки границы, но иногда внутренние границы также включены, как вы можете наблюдать в 3rd, 5-й, 6-й результаты. Темная сторона внутри рождественских елок не только не может быть сгруппирована с освещенной стороной, но они также приводят к такому количеству крошечных внутренних границ (imfill не очень улучшается). Во всем моем алгоритме все еще есть много места для улучшения.






некоторые публикацииs указывает, что среднее смещение может быть более надежным, чем k-means, и многие график-отрезок на основе алгоритмы также очень конкурентоспособны на сложных границах сегментация. Я сам написал алгоритм среднего сдвига, кажется, лучше извлечь области без света. Но mean-shift немного перегруппирован, и некоторая стратегия слияние необходимо. Он работал даже намного медленнее, чем k-means на моем компьютере, боюсь, у меня есть отказаться от него. Я с нетерпением жду, чтобы другие представили отличные результаты здесь с этими современными алгоритмами, упомянутыми выше.
тем не менее, я всегда считаю, что выбор функций является ключевым компонентом сегментации изображений. С правильный выбор функций, который может максимизировать разрыв между объектом и фоном, многие алгоритмы сегментации определенно будут работать. Различные алгоритмы могут улучшить результат от 1 до 10, но выбор функции может улучшить его от 0 до 1.
С Рождеством !
Это мой последний пост с использованием традиционных методов обработки снимков...
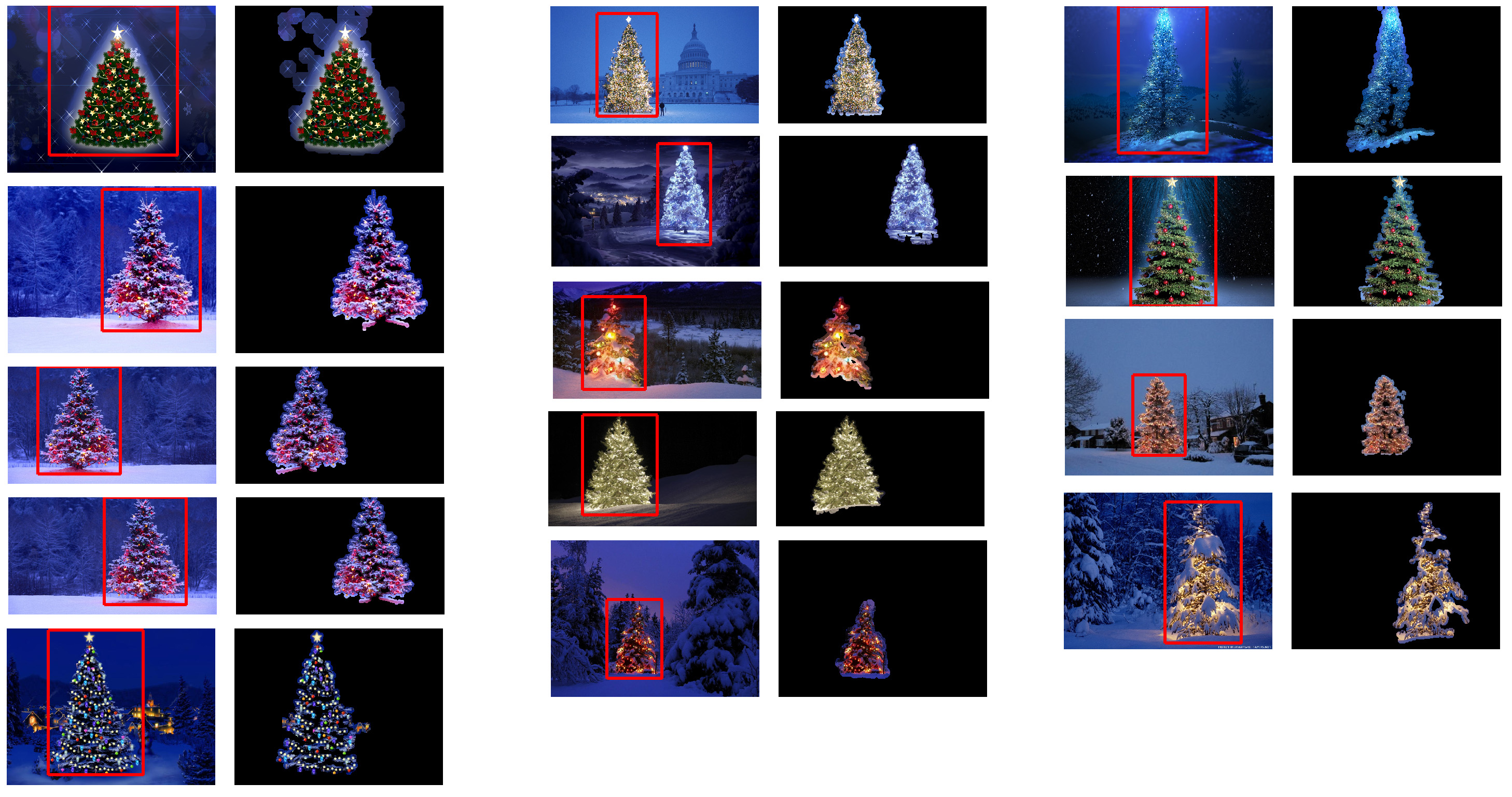
здесь я как-то объединяю свои два других предложения, достижение еще лучших результатов. На самом деле я не вижу, как эти результаты могут быть лучше (особенно когда вы смотрите на замаскированные изображения, которые производит метод).
в основе подхода лежит комбинация три ключевые допущения:
- изображения должны иметь высокий колебания в областях деревьев
- изображения должны иметь более высокую интенсивность в областях дерева
- фоновые области должны иметь низкую интенсивность и быть в основном синими
С учетом этих предположений метод работает следующим образом:
- преобразование изображений в HSV
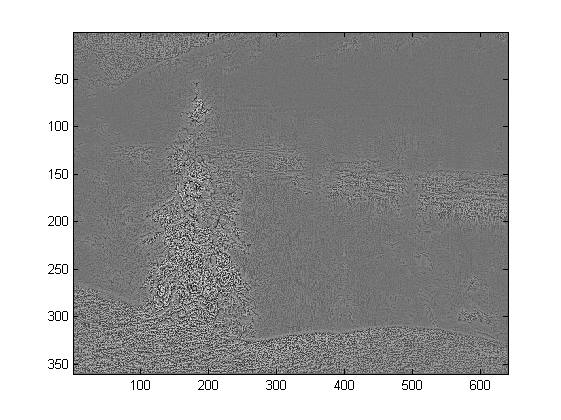
- фильтр канале V с фильтром журнала
- применить жесткий порог на отфильтрованное изображение журнала, чтобы получить маску " активность А
- примените жесткий порог к V-каналу, чтобы получить маску интенсивности B
- применить H-канальный порог для захвата низкоинтенсивных синих областей в фоновую маску C
- комбинируйте маски с помощью и получите окончательную маску
- расширьте маску для увеличения областей и подключения рассеянных пикселей
- устранить небольшие области и получить окончательную маску, которая в конечном итоге будет представлять только дерево
вот код в MATLAB (опять же, скрипт загружает все jpg-изображения в текущую папку и, опять же, это далеко не оптимизированный фрагмент кода):
% clear everything
clear;
pack;
close all;
close all hidden;
drawnow;
clc;
% initialization
ims=dir('./*.jpg');
imgs={};
images={};
blur_images={};
log_image={};
dilated_image={};
int_image={};
back_image={};
bin_image={};
measurements={};
box={};
num=length(ims);
thres_div = 3;
for i=1:num,
% load original image
imgs{end+1}=imread(ims(i).name);
% convert to HSV colorspace
images{end+1}=rgb2hsv(imgs{i});
% apply laplacian filtering and heuristic hard thresholding
val_thres = (max(max(images{i}(:,:,3)))/thres_div);
log_image{end+1} = imfilter( images{i}(:,:,3),fspecial('log')) > val_thres;
% get the most bright regions of the image
int_thres = 0.26*max(max( images{i}(:,:,3)));
int_image{end+1} = images{i}(:,:,3) > int_thres;
% get the most probable background regions of the image
back_image{end+1} = images{i}(:,:,1)>(150/360) & images{i}(:,:,1)<(320/360) & images{i}(:,:,3)<0.5;
% compute the final binary image by combining
% high 'activity' with high intensity
bin_image{end+1} = logical( log_image{i}) & logical( int_image{i}) & ~logical( back_image{i});
% apply morphological dilation to connect distonnected components
strel_size = round(0.01*max(size(imgs{i}))); % structuring element for morphological dilation
dilated_image{end+1} = imdilate( bin_image{i}, strel('disk',strel_size));
% do some measurements to eliminate small objects
measurements{i} = regionprops( logical( dilated_image{i}),'Area','BoundingBox');
% iterative enlargement of the structuring element for better connectivity
while length(measurements{i})>14 && strel_size<(min(size(imgs{i}(:,:,1)))/2),
strel_size = round( 1.5 * strel_size);
dilated_image{i} = imdilate( bin_image{i}, strel('disk',strel_size));
measurements{i} = regionprops( logical( dilated_image{i}),'Area','BoundingBox');
end
for m=1:length(measurements{i})
if measurements{i}(m).Area < 0.05*numel( dilated_image{i})
dilated_image{i}( round(measurements{i}(m).BoundingBox(2):measurements{i}(m).BoundingBox(4)+measurements{i}(m).BoundingBox(2)),...
round(measurements{i}(m).BoundingBox(1):measurements{i}(m).BoundingBox(3)+measurements{i}(m).BoundingBox(1))) = 0;
end
end
% make sure the dilated image is the same size with the original
dilated_image{i} = dilated_image{i}(1:size(imgs{i},1),1:size(imgs{i},2));
% compute the bounding box
[y,x] = find( dilated_image{i});
if isempty( y)
box{end+1}=[];
else
box{end+1} = [ min(x) min(y) max(x)-min(x)+1 max(y)-min(y)+1];
end
end
%%% additional code to display things
for i=1:num,
figure;
subplot(121);
colormap gray;
imshow( imgs{i});
if ~isempty(box{i})
hold on;
rr = rectangle( 'position', box{i});
set( rr, 'EdgeColor', 'r');
hold off;
end
subplot(122);
imshow( imgs{i}.*uint8(repmat(dilated_image{i},[1 1 3])));
end
результаты
высокие результаты разрешения все еще здесь!
еще больше экспериментов с дополнительными изображениями можно найти здесь.
{kind=link}
{kind=link}
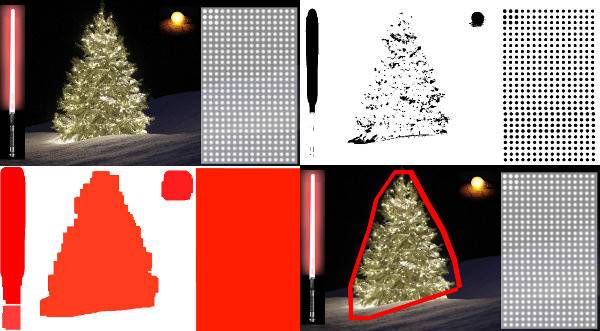
мои шаги решения:
Get R channel (from RGB) - все операции, которые мы делаем на этом канале:
-
создать область интереса (ROI)
пороговый канал R с минимальным значением 149 (верхнее правое изображение)
расширить область результата (среднее левое изображение)
-
обнаружение eges в вычисляемом roi. Дерево имеет много ребер (среднее правое изображение)
растянуть результате
Erode с большим радиусом (нижнее левое изображение)
выберите самый большой (по площади) объект - это результат области
ConvexHull (дерево-выпуклый многоугольник) (нижнее правое изображение)
ограничивающая коробка (нижнее правое изображение - grren box )
шаг за шагом:
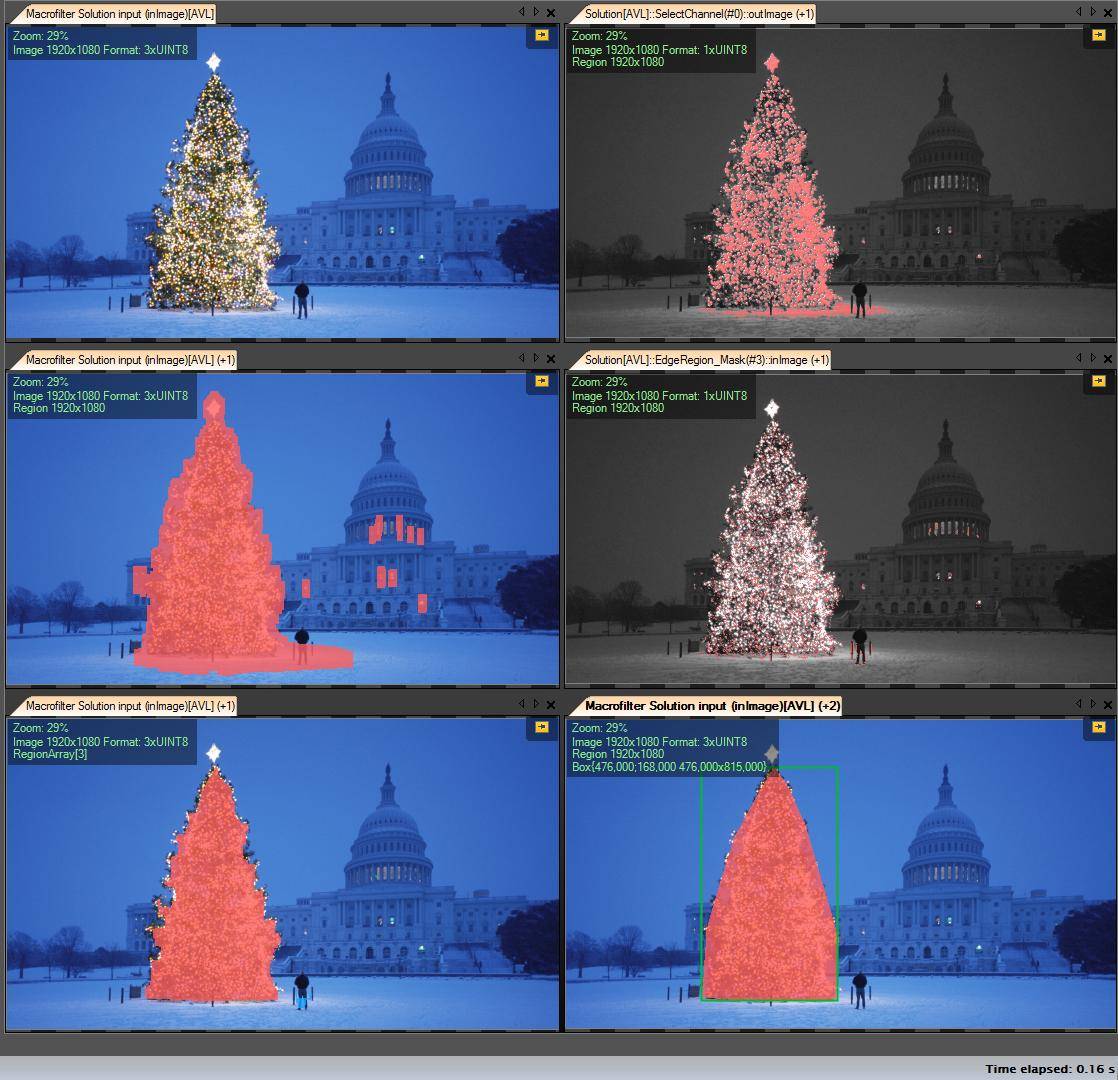
первый результат-самое простое, но не в программном обеспечении с открытым исходным кодом - " Adaptive Vision Studio + библиотека адаптивного зрения": Это не с открытым исходным кодом, но очень быстро прототип:
весь алгоритм для обнаружения елки (11 блоков):
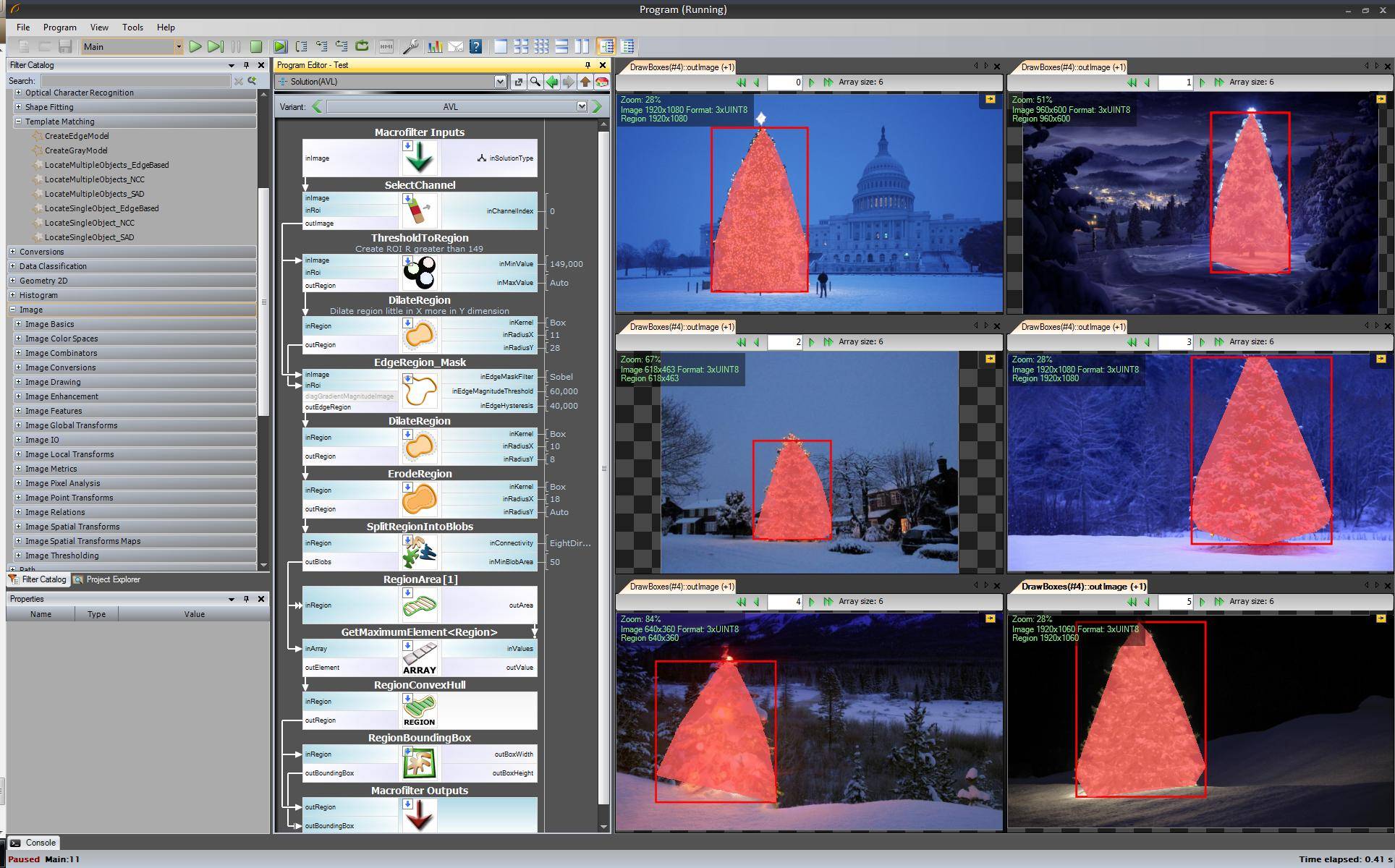
следующий шаг. Мы хотим решение с открытым исходным кодом. Измените фильтры AVL на фильтры OpenCV: Здесь я сделал небольшие изменения, например, обнаружение края используйте фильтр cvCanny, чтобы уважать roi я умножил изображение области с изображением краев, чтобы выбрать самый большой элемент i используется findContours + contourArea, но идея та же.
https://www.youtube.com/watch?v=sfjB3MigLH0&index=1&list=UUpSRrkMHNHiLDXgylwhWNQQ
Я не могу показывать изображения с промежуточными шагами, потому что я могу поместить только 2 ссылки.
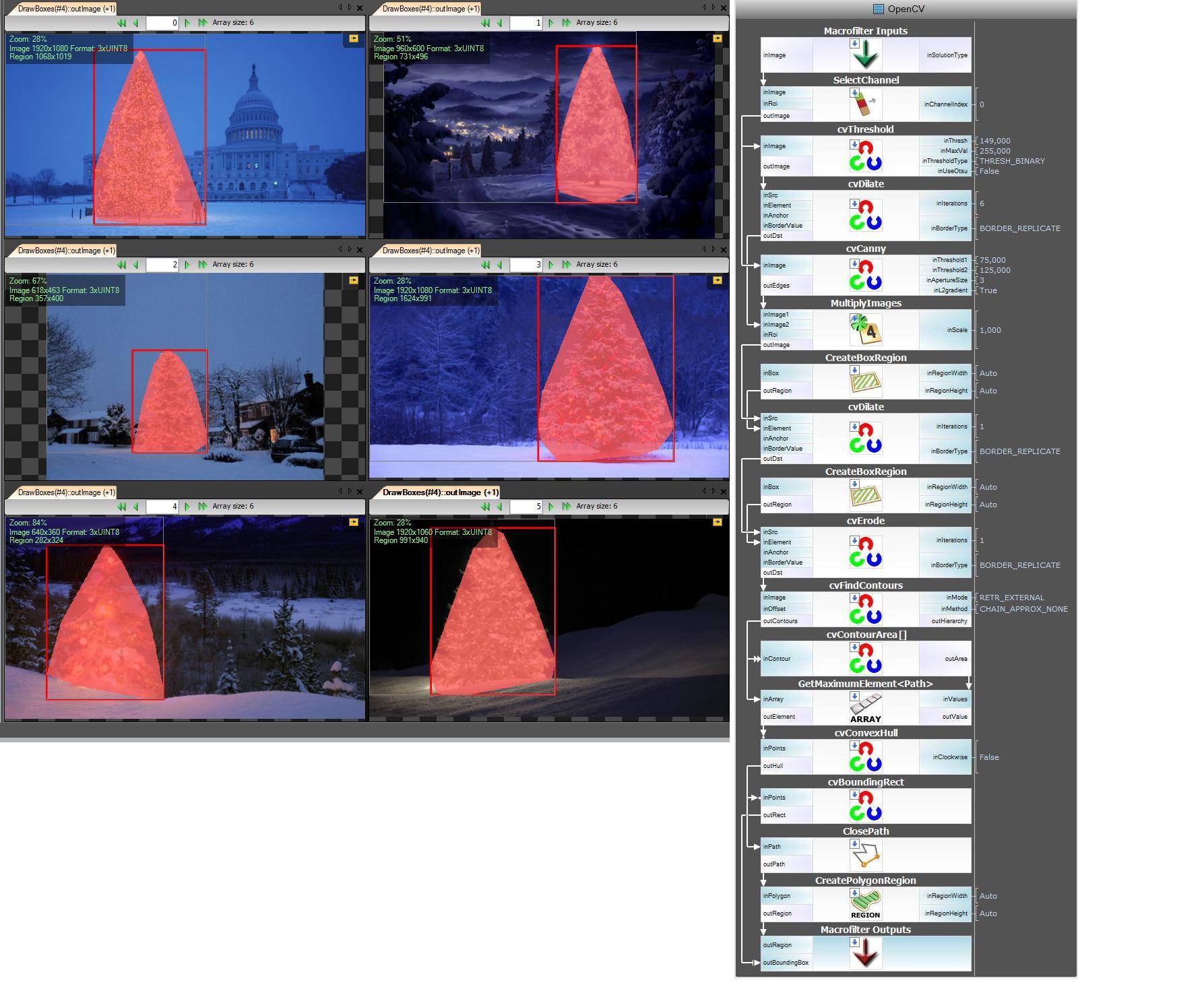
Ok теперь мы используем фильтры с открытым исходным кодом, но это еще не весь открытый исходный код. Последний шаг-порт для кода c++. Я использовал OpenCV в версии 2.4.4
результат окончательного кода c++ есть:
код C++ также довольно короткий:
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
#include <algorithm>
using namespace cv;
int main()
{
string images[6] = {"..\1.png","..\2.png","..\3.png","..\4.png","..\5.png","..\6.png"};
for(int i = 0; i < 6; ++i)
{
Mat img, thresholded, tdilated, tmp, tmp1;
vector<Mat> channels(3);
img = imread(images[i]);
split(img, channels);
threshold( channels[2], thresholded, 149, 255, THRESH_BINARY); //prepare ROI - threshold
dilate( thresholded, tdilated, getStructuringElement( MORPH_RECT, Size(22,22) ) ); //prepare ROI - dilate
Canny( channels[2], tmp, 75, 125, 3, true ); //Canny edge detection
multiply( tmp, tdilated, tmp1 ); // set ROI
dilate( tmp1, tmp, getStructuringElement( MORPH_RECT, Size(20,16) ) ); // dilate
erode( tmp, tmp1, getStructuringElement( MORPH_RECT, Size(36,36) ) ); // erode
vector<vector<Point> > contours, contours1(1);
vector<Point> convex;
vector<Vec4i> hierarchy;
findContours( tmp1, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
//get element of maximum area
//int bestID = std::max_element( contours.begin(), contours.end(),
// []( const vector<Point>& A, const vector<Point>& B ) { return contourArea(A) < contourArea(B); } ) - contours.begin();
int bestID = 0;
int bestArea = contourArea( contours[0] );
for( int i = 1; i < contours.size(); ++i )
{
int area = contourArea( contours[i] );
if( area > bestArea )
{
bestArea = area;
bestID = i;
}
}
convexHull( contours[bestID], contours1[0] );
drawContours( img, contours1, 0, Scalar( 100, 100, 255 ), img.rows / 100, 8, hierarchy, 0, Point() );
imshow("image", img );
waitKey(0);
}
return 0;
}
...еще одно старомодное решение-чисто на основе обработки HSV:
- преобразование изображений в цветовое пространство HSV
- создание масок в соответствии с эвристикой в HSV (см. ниже)
- применить морфологическое расширение к маске для подключения отключенных областей
- отбросьте небольшие площади и горизонтальные блоки (помните, что деревья являются вертикальными блоками)
- вычислить ограничивающую рамку
слова на эвристику в обработке HSV:
- все оттенки (H) между 210 - 320 градусов отбрасывается как сине-пурпурный, который должен быть в фоновом режиме или в несущественных областях
- все значения (V) ниже, чем 40% также отбрасывается как слишком темный, чтобы быть актуальным
конечно можно экспериментировать с многочисленными другими возможностями для тонкой настройки подход...
вот код MATLAB, чтобы сделать трюк (предупреждение: код далек от оптимизации!!! Я использовал методы, не рекомендованные для программирования MATLAB, чтобы иметь возможность отслеживать что-либо в процессе-это можно значительно оптимизировать):
% clear everything
clear;
pack;
close all;
close all hidden;
drawnow;
clc;
% initialization
ims=dir('./*.jpg');
num=length(ims);
imgs={};
hsvs={};
masks={};
dilated_images={};
measurements={};
boxs={};
for i=1:num,
% load original image
imgs{end+1} = imread(ims(i).name);
flt_x_size = round(size(imgs{i},2)*0.005);
flt_y_size = round(size(imgs{i},1)*0.005);
flt = fspecial( 'average', max( flt_y_size, flt_x_size));
imgs{i} = imfilter( imgs{i}, flt, 'same');
% convert to HSV colorspace
hsvs{end+1} = rgb2hsv(imgs{i});
% apply a hard thresholding and binary operation to construct the mask
masks{end+1} = medfilt2( ~(hsvs{i}(:,:,1)>(210/360) & hsvs{i}(:,:,1)<(320/360))&hsvs{i}(:,:,3)>0.4);
% apply morphological dilation to connect distonnected components
strel_size = round(0.03*max(size(imgs{i}))); % structuring element for morphological dilation
dilated_images{end+1} = imdilate( masks{i}, strel('disk',strel_size));
% do some measurements to eliminate small objects
measurements{i} = regionprops( dilated_images{i},'Perimeter','Area','BoundingBox');
for m=1:length(measurements{i})
if (measurements{i}(m).Area < 0.02*numel( dilated_images{i})) || (measurements{i}(m).BoundingBox(3)>1.2*measurements{i}(m).BoundingBox(4))
dilated_images{i}( round(measurements{i}(m).BoundingBox(2):measurements{i}(m).BoundingBox(4)+measurements{i}(m).BoundingBox(2)),...
round(measurements{i}(m).BoundingBox(1):measurements{i}(m).BoundingBox(3)+measurements{i}(m).BoundingBox(1))) = 0;
end
end
dilated_images{i} = dilated_images{i}(1:size(imgs{i},1),1:size(imgs{i},2));
% compute the bounding box
[y,x] = find( dilated_images{i});
if isempty( y)
boxs{end+1}=[];
else
boxs{end+1} = [ min(x) min(y) max(x)-min(x)+1 max(y)-min(y)+1];
end
end
%%% additional code to display things
for i=1:num,
figure;
subplot(121);
colormap gray;
imshow( imgs{i});
if ~isempty(boxs{i})
hold on;
rr = rectangle( 'position', boxs{i});
set( rr, 'EdgeColor', 'r');
hold off;
end
subplot(122);
imshow( imgs{i}.*uint8(repmat(dilated_images{i},[1 1 3])));
end
результаты:
в результатах я показываю замаскированное изображение и ограничивающую рамку.
какой-то старомодный подход к обработке изображения...
Идея основана на предположение, что изображения изображают освещенные деревья на обычно более темном и гладком фоне (или на переднем плане в некоторых случаях). The освещенная область дерева более "энергична" и имеет более высокую интенсивность.
Процесс выглядит следующим образом:
- преобразовать в graylevel
- применить фильтрацию журнала, чтобы получить наиболее "активные" области
- применить intentisy порога, чтобы получить наиболее светлых областях
- объединить предыдущие 2, чтобы получить предварительную маску
- примените морфологическое расширение для увеличения площадей и подключения соседних компонентов
- устранить небольшие области кандидатов в соответствии с их размером площади
вы получаете двоичную маску и ограничивающую рамку для каждого изображения.
вот результаты, использующие этот наивный техника:
код на MATLAB следует: Код выполняется в папке с изображениями JPG. Загружает все изображения и возвращает обнаруженные результаты.
% clear everything
clear;
pack;
close all;
close all hidden;
drawnow;
clc;
% initialization
ims=dir('./*.jpg');
imgs={};
images={};
blur_images={};
log_image={};
dilated_image={};
int_image={};
bin_image={};
measurements={};
box={};
num=length(ims);
thres_div = 3;
for i=1:num,
% load original image
imgs{end+1}=imread(ims(i).name);
% convert to grayscale
images{end+1}=rgb2gray(imgs{i});
% apply laplacian filtering and heuristic hard thresholding
val_thres = (max(max(images{i}))/thres_div);
log_image{end+1} = imfilter( images{i},fspecial('log')) > val_thres;
% get the most bright regions of the image
int_thres = 0.26*max(max( images{i}));
int_image{end+1} = images{i} > int_thres;
% compute the final binary image by combining
% high 'activity' with high intensity
bin_image{end+1} = log_image{i} .* int_image{i};
% apply morphological dilation to connect distonnected components
strel_size = round(0.01*max(size(imgs{i}))); % structuring element for morphological dilation
dilated_image{end+1} = imdilate( bin_image{i}, strel('disk',strel_size));
% do some measurements to eliminate small objects
measurements{i} = regionprops( logical( dilated_image{i}),'Area','BoundingBox');
for m=1:length(measurements{i})
if measurements{i}(m).Area < 0.05*numel( dilated_image{i})
dilated_image{i}( round(measurements{i}(m).BoundingBox(2):measurements{i}(m).BoundingBox(4)+measurements{i}(m).BoundingBox(2)),...
round(measurements{i}(m).BoundingBox(1):measurements{i}(m).BoundingBox(3)+measurements{i}(m).BoundingBox(1))) = 0;
end
end
% make sure the dilated image is the same size with the original
dilated_image{i} = dilated_image{i}(1:size(imgs{i},1),1:size(imgs{i},2));
% compute the bounding box
[y,x] = find( dilated_image{i});
if isempty( y)
box{end+1}=[];
else
box{end+1} = [ min(x) min(y) max(x)-min(x)+1 max(y)-min(y)+1];
end
end
%%% additional code to display things
for i=1:num,
figure;
subplot(121);
colormap gray;
imshow( imgs{i});
if ~isempty(box{i})
hold on;
rr = rectangle( 'position', box{i});
set( rr, 'EdgeColor', 'r');
hold off;
end
subplot(122);
imshow( imgs{i}.*uint8(repmat(dilated_image{i},[1 1 3])));
end
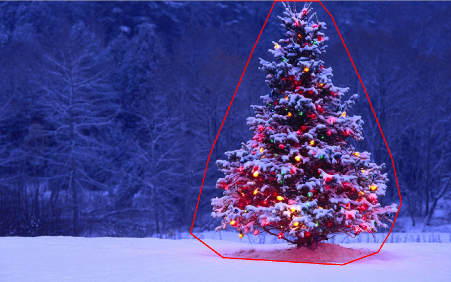
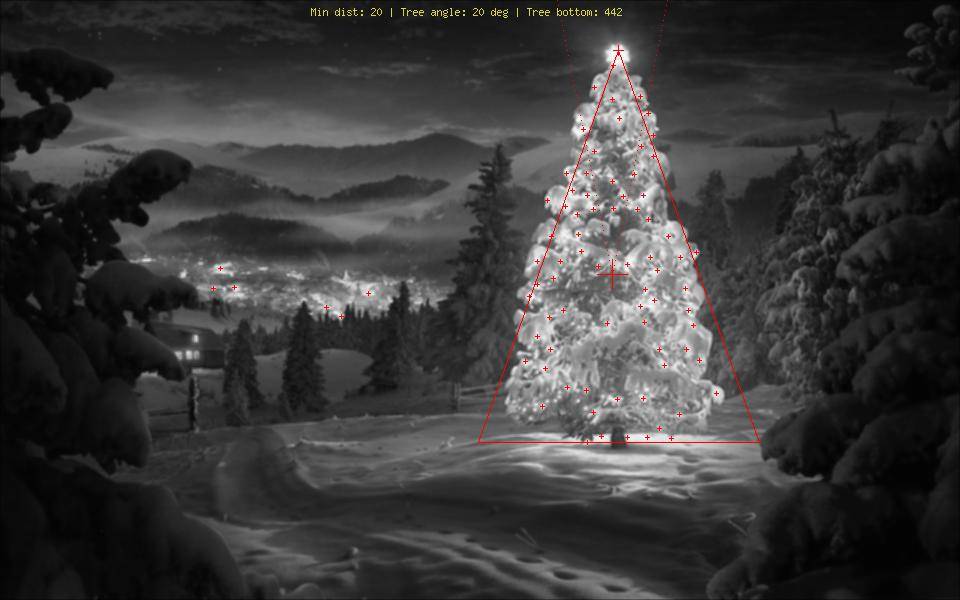
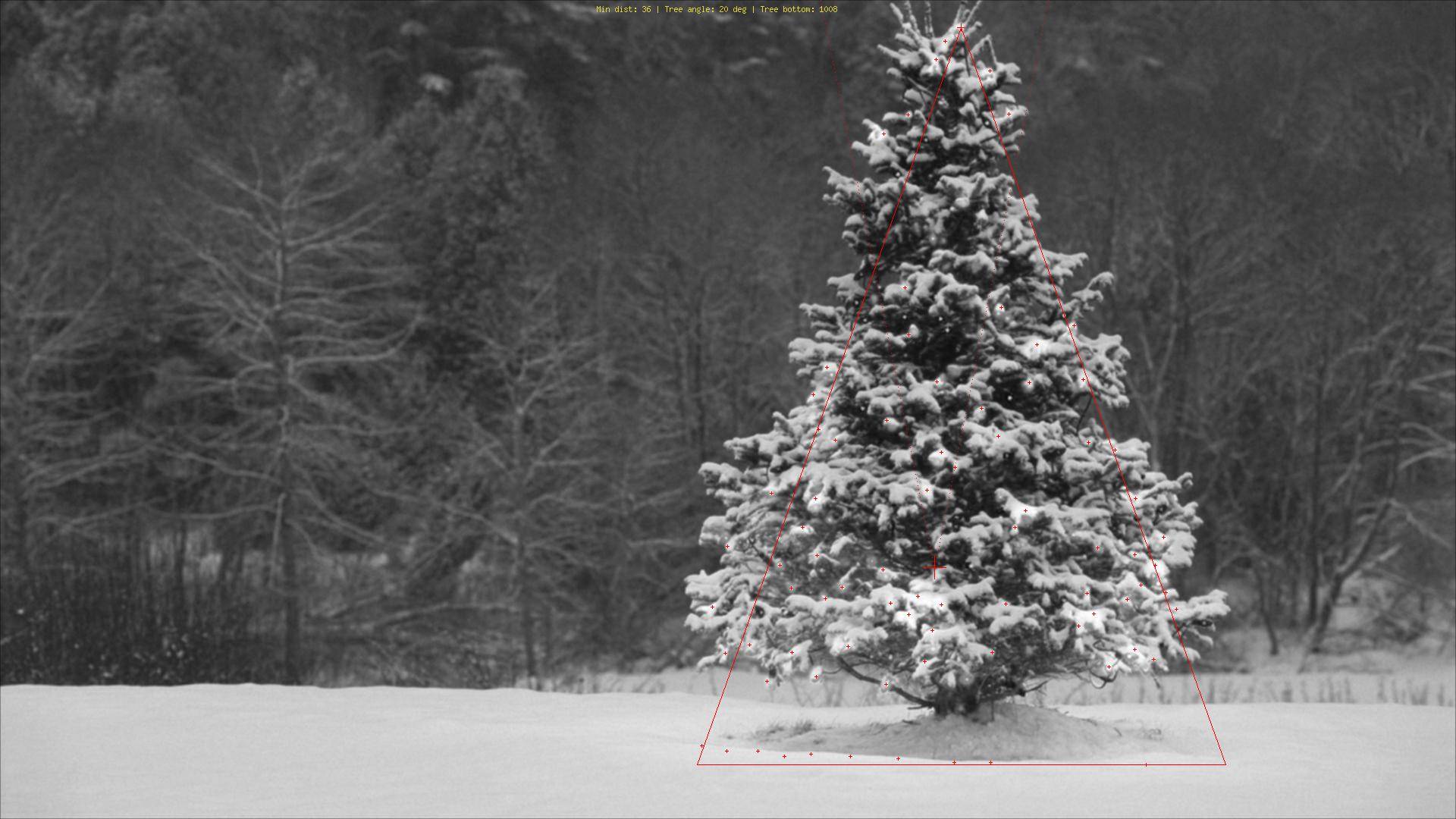
используя совершенно другой подход из того, что я видел, я создал php скрипт, который обнаруживает рождественские елки по их огням. Результат всегда симметричный треугольник, и при необходимости числовые значения, такие как угол ("жирность") дерева.
самой большой угрозой для этого алгоритма, очевидно, являются огни рядом (в большом количестве) или перед деревом (большая проблема до дальнейшей оптимизации). Edit (added): что он не может сделать: узнайте, есть ли рождественская елка или нет, найдите несколько рождественских елок на одном изображении, правильно обнаружьте рождественскую елку в середине Лас-Вегаса, обнаружьте рождественские елки, которые сильно согнуты, перевернуты или срублены... ;)
различные этапы:
- вычислить добавленную яркость (R+G+B) для каждого пикселя
- добавьте это значение всех 8 соседних пикселей поверх каждого пикселя
- ранжировать все пиксели по этому значению (самый яркий первый) - я знаю, не очень тонко...
- выберите N из них, начиная с верхней, пропуская те, которые слишком близко
- вычислить в среднем из этих верхних N (дает нам приблизительный центр дерева)
- начните со среднего положения вверх в расширяющемся луче поиска самого верхнего света из выбранных самых ярких (люди, как правило, ставят по крайней мере один свет на самом верху)
- оттуда, представьте, что линии на 60 градусов влево и вправо вниз (елки не должны быть такими толстыми)
- уменьшите эти 60 градусов до 20% самых ярких огней за пределами этого треугольника
- найти свет в самом низу треугольника, давая вам нижнюю горизонтальную границу дерева
- сделал
пояснение маркировки:
- Большой Красный Крест в центре дерева: медиана верхней N ярких огней
- пунктирная линия оттуда вверх: "луч поиска" для вершины дерева
- меньший Красный Крест: вершина дерева
- действительно маленькие красные крестики: все верхние N самых ярких огней
- Красный треугольник: Д'uh!
исходный код:
<?php
ini_set('memory_limit', '1024M');
header("Content-type: image/png");
$chosenImage = 6;
switch($chosenImage){
case 1:
$inputImage = imagecreatefromjpeg("nmzwj.jpg");
break;
case 2:
$inputImage = imagecreatefromjpeg("2y4o5.jpg");
break;
case 3:
$inputImage = imagecreatefromjpeg("YowlH.jpg");
break;
case 4:
$inputImage = imagecreatefromjpeg("2K9Ef.jpg");
break;
case 5:
$inputImage = imagecreatefromjpeg("aVZhC.jpg");
break;
case 6:
$inputImage = imagecreatefromjpeg("FWhSP.jpg");
break;
case 7:
$inputImage = imagecreatefromjpeg("roemerberg.jpg");
break;
default:
exit();
}
// Process the loaded image
$topNspots = processImage($inputImage);
imagejpeg($inputImage);
imagedestroy($inputImage);
// Here be functions
function processImage($image) {
$orange = imagecolorallocate($image, 220, 210, 60);
$black = imagecolorallocate($image, 0, 0, 0);
$red = imagecolorallocate($image, 255, 0, 0);
$maxX = imagesx($image)-1;
$maxY = imagesy($image)-1;
// Parameters
$spread = 1; // Number of pixels to each direction that will be added up
$topPositions = 80; // Number of (brightest) lights taken into account
$minLightDistance = round(min(array($maxX, $maxY)) / 30); // Minimum number of pixels between the brigtests lights
$searchYperX = 5; // spread of the "search beam" from the median point to the top
$renderStage = 3; // 1 to 3; exits the process early
// STAGE 1
// Calculate the brightness of each pixel (R+G+B)
$maxBrightness = 0;
$stage1array = array();
for($row = 0; $row <= $maxY; $row++) {
$stage1array[$row] = array();
for($col = 0; $col <= $maxX; $col++) {
$rgb = imagecolorat($image, $col, $row);
$brightness = getBrightnessFromRgb($rgb);
$stage1array[$row][$col] = $brightness;
if($renderStage == 1){
$brightnessToGrey = round($brightness / 765 * 256);
$greyRgb = imagecolorallocate($image, $brightnessToGrey, $brightnessToGrey, $brightnessToGrey);
imagesetpixel($image, $col, $row, $greyRgb);
}
if($brightness > $maxBrightness) {
$maxBrightness = $brightness;
if($renderStage == 1){
imagesetpixel($image, $col, $row, $red);
}
}
}
}
if($renderStage == 1) {
return;
}
// STAGE 2
// Add up brightness of neighbouring pixels
$stage2array = array();
$maxStage2 = 0;
for($row = 0; $row <= $maxY; $row++) {
$stage2array[$row] = array();
for($col = 0; $col <= $maxX; $col++) {
if(!isset($stage2array[$row][$col])) $stage2array[$row][$col] = 0;
// Look around the current pixel, add brightness
for($y = $row-$spread; $y <= $row+$spread; $y++) {
for($x = $col-$spread; $x <= $col+$spread; $x++) {
// Don't read values from outside the image
if($x >= 0 && $x <= $maxX && $y >= 0 && $y <= $maxY){
$stage2array[$row][$col] += $stage1array[$y][$x]+10;
}
}
}
$stage2value = $stage2array[$row][$col];
if($stage2value > $maxStage2) {
$maxStage2 = $stage2value;
}
}
}
if($renderStage >= 2){
// Paint the accumulated light, dimmed by the maximum value from stage 2
for($row = 0; $row <= $maxY; $row++) {
for($col = 0; $col <= $maxX; $col++) {
$brightness = round($stage2array[$row][$col] / $maxStage2 * 255);
$greyRgb = imagecolorallocate($image, $brightness, $brightness, $brightness);
imagesetpixel($image, $col, $row, $greyRgb);
}
}
}
if($renderStage == 2) {
return;
}
// STAGE 3
// Create a ranking of bright spots (like "Top 20")
$topN = array();
for($row = 0; $row <= $maxY; $row++) {
for($col = 0; $col <= $maxX; $col++) {
$stage2Brightness = $stage2array[$row][$col];
$topN[$col.":".$row] = $stage2Brightness;
}
}
arsort($topN);
$topNused = array();
$topPositionCountdown = $topPositions;
if($renderStage == 3){
foreach ($topN as $key => $val) {
if($topPositionCountdown <= 0){
break;
}
$position = explode(":", $key);
foreach($topNused as $usedPosition => $usedValue) {
$usedPosition = explode(":", $usedPosition);
$distance = abs($usedPosition[0] - $position[0]) + abs($usedPosition[1] - $position[1]);
if($distance < $minLightDistance) {
continue 2;
}
}
$topNused[$key] = $val;
paintCrosshair($image, $position[0], $position[1], $red, 2);
$topPositionCountdown--;
}
}
// STAGE 4
// Median of all Top N lights
$topNxValues = array();
$topNyValues = array();
foreach ($topNused as $key => $val) {
$position = explode(":", $key);
array_push($topNxValues, $position[0]);
array_push($topNyValues, $position[1]);
}
$medianXvalue = round(calculate_median($topNxValues));
$medianYvalue = round(calculate_median($topNyValues));
paintCrosshair($image, $medianXvalue, $medianYvalue, $red, 15);
// STAGE 5
// Find treetop
$filename = 'debug.log';
$handle = fopen($filename, "w");
fwrite($handle, "\n\n STAGE 5");
$treetopX = $medianXvalue;
$treetopY = $medianYvalue;
$searchXmin = $medianXvalue;
$searchXmax = $medianXvalue;
$width = 0;
for($y = $medianYvalue; $y >= 0; $y--) {
fwrite($handle, "\nAt y = ".$y);
if(($y % $searchYperX) == 0) { // Modulo
$width++;
$searchXmin = $medianXvalue - $width;
$searchXmax = $medianXvalue + $width;
imagesetpixel($image, $searchXmin, $y, $red);
imagesetpixel($image, $searchXmax, $y, $red);
}
foreach ($topNused as $key => $val) {
$position = explode(":", $key); // "x:y"
if($position[1] != $y){
continue;
}
if($position[0] >= $searchXmin && $position[0] <= $searchXmax){
$treetopX = $position[0];
$treetopY = $y;
}
}
}
paintCrosshair($image, $treetopX, $treetopY, $red, 5);
// STAGE 6
// Find tree sides
fwrite($handle, "\n\n STAGE 6");
$treesideAngle = 60; // The extremely "fat" end of a christmas tree
$treeBottomY = $treetopY;
$topPositionsExcluded = 0;
$xymultiplier = 0;
while(($topPositionsExcluded < ($topPositions / 5)) && $treesideAngle >= 1){
fwrite($handle, "\n\nWe're at angle ".$treesideAngle);
$xymultiplier = sin(deg2rad($treesideAngle));
fwrite($handle, "\nMultiplier: ".$xymultiplier);
$topPositionsExcluded = 0;
foreach ($topNused as $key => $val) {
$position = explode(":", $key);
fwrite($handle, "\nAt position ".$key);
if($position[1] > $treeBottomY) {
$treeBottomY = $position[1];
}
// Lights above the tree are outside of it, but don't matter
if($position[1] < $treetopY){
$topPositionsExcluded++;
fwrite($handle, "\nTOO HIGH");
continue;
}
// Top light will generate division by zero
if($treetopY-$position[1] == 0) {
fwrite($handle, "\nDIVISION BY ZERO");
continue;
}
// Lights left end right of it are also not inside
fwrite($handle, "\nLight position factor: ".(abs($treetopX-$position[0]) / abs($treetopY-$position[1])));
if((abs($treetopX-$position[0]) / abs($treetopY-$position[1])) > $xymultiplier){
$topPositionsExcluded++;
fwrite($handle, "\n --- Outside tree ---");
}
}
$treesideAngle--;
}
fclose($handle);
// Paint tree's outline
$treeHeight = abs($treetopY-$treeBottomY);
$treeBottomLeft = 0;
$treeBottomRight = 0;
$previousState = false; // line has not started; assumes the tree does not "leave"^^
for($x = 0; $x <= $maxX; $x++){
if(abs($treetopX-$x) != 0 && abs($treetopX-$x) / $treeHeight > $xymultiplier){
if($previousState == true){
$treeBottomRight = $x;
$previousState = false;
}
continue;
}
imagesetpixel($image, $x, $treeBottomY, $red);
if($previousState == false){
$treeBottomLeft = $x;
$previousState = true;
}
}
imageline($image, $treeBottomLeft, $treeBottomY, $treetopX, $treetopY, $red);
imageline($image, $treeBottomRight, $treeBottomY, $treetopX, $treetopY, $red);
// Print out some parameters
$string = "Min dist: ".$minLightDistance." | Tree angle: ".$treesideAngle." deg | Tree bottom: ".$treeBottomY;
$px = (imagesx($image) - 6.5 * strlen($string)) / 2;
imagestring($image, 2, $px, 5, $string, $orange);
return $topN;
}
/**
* Returns values from 0 to 765
*/
function getBrightnessFromRgb($rgb) {
$r = ($rgb >> 16) & 0xFF;
$g = ($rgb >> 8) & 0xFF;
$b = $rgb & 0xFF;
return $r+$r+$b;
}
function paintCrosshair($image, $posX, $posY, $color, $size=5) {
for($x = $posX-$size; $x <= $posX+$size; $x++) {
if($x>=0 && $x < imagesx($image)){
imagesetpixel($image, $x, $posY, $color);
}
}
for($y = $posY-$size; $y <= $posY+$size; $y++) {
if($y>=0 && $y < imagesy($image)){
imagesetpixel($image, $posX, $y, $color);
}
}
}
// From http://www.mdj.us/web-development/php-programming/calculating-the-median-average-values-of-an-array-with-php/
function calculate_median($arr) {
sort($arr);
$count = count($arr); //total numbers in array
$middleval = floor(($count-1)/2); // find the middle value, or the lowest middle value
if($count % 2) { // odd number, middle is the median
$median = $arr[$middleval];
} else { // even number, calculate avg of 2 medians
$low = $arr[$middleval];
$high = $arr[$middleval+1];
$median = (($low+$high)/2);
}
return $median;
}
?>
картинки:




бонус: немецкий Weihnachtsbaum, от Википедия
 http://commons.wikimedia.org/wiki/File:Weihnachtsbaum_R%C3%B6merberg.jpg
http://commons.wikimedia.org/wiki/File:Weihnachtsbaum_R%C3%B6merberg.jpg
{kind=link}
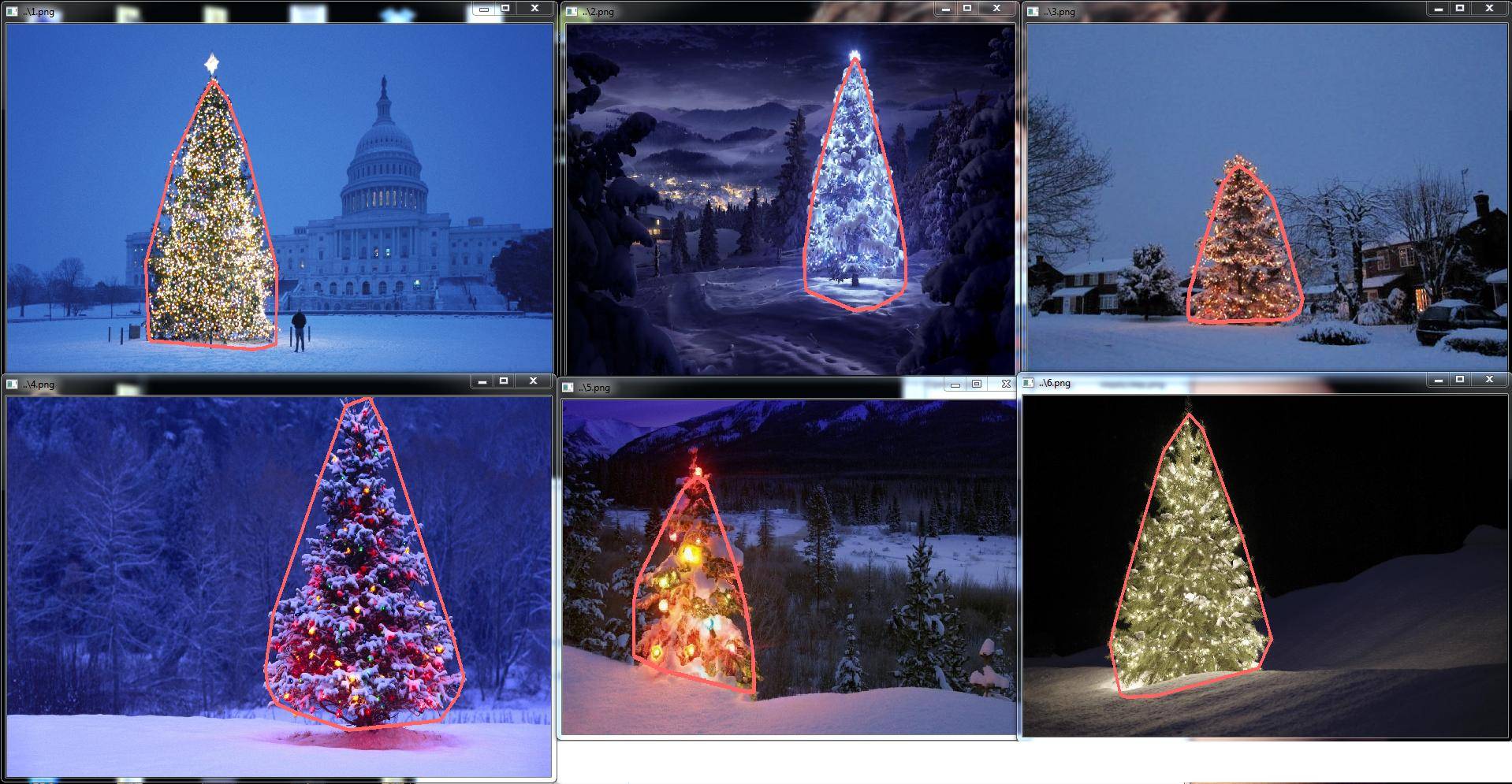
я использовал python с opencv.
мой алгоритм выглядит так:
- сначала он берет красный канал из изображения
- применить порог (минимальное значение 200) к красному каналу
- затем примените морфологический градиент, а затем сделайте " закрытие "(расширение с последующей эрозией)
- затем он находит контуры в плоскости и выбирает самый длинный контур.

в код:
import numpy as np
import cv2
import copy
def findTree(image,num):
im = cv2.imread(image)
im = cv2.resize(im, (400,250))
gray = cv2.cvtColor(im, cv2.COLOR_RGB2GRAY)
imf = copy.deepcopy(im)
b,g,r = cv2.split(im)
minR = 200
_,thresh = cv2.threshold(r,minR,255,0)
kernel = np.ones((25,5))
dst = cv2.morphologyEx(thresh, cv2.MORPH_GRADIENT, kernel)
dst = cv2.morphologyEx(dst, cv2.MORPH_CLOSE, kernel)
contours = cv2.findContours(dst,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)[0]
cv2.drawContours(im, contours,-1, (0,255,0), 1)
maxI = 0
for i in range(len(contours)):
if len(contours[maxI]) < len(contours[i]):
maxI = i
img = copy.deepcopy(r)
cv2.polylines(img,[contours[maxI]],True,(255,255,255),3)
imf[:,:,2] = img
cv2.imshow(str(num), imf)
def main():
findTree('tree.jpg',1)
findTree('tree2.jpg',2)
findTree('tree3.jpg',3)
findTree('tree4.jpg',4)
findTree('tree5.jpg',5)
findTree('tree6.jpg',6)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
если я изменю ядро с (25,5) на (10,5)
Я получаю более хорошие результаты на всех деревьях, но внизу слева,

мой алгоритм предполагает, что дерево имеет огни на ней, и в левом нижнем дереве верхушка имеет меньше света, чем остальные.