Кратчайшее расстояние между двумя отрезками линии
Мне нужна функция, чтобы найти кратчайшее расстояние между двумя сегментами линии. Отрезок прямой определяется двумя точками. Так, например, один из моих отрезков линии (AB) будет определен двумя точками A (x1,y1) и B (x2,y2), а другой (CD) будет определен двумя точками C (x1,y1) и D (x2, y2).
Не стесняйтесь писать решение на любом языке, который вы хотите, и я могу перевести его на javascript. Пожалуйста, имейте в виду, что мои геометрические навыки довольно ржавые. Я уже видел здесь и я не уверен, как перевести это в функцию. Большое спасибо за помощь.
9 ответов
Это в 2 измерениях? Если да, то ответ будет просто кратчайшим расстоянием между точкой А и отрезком линии CD, B и CD, C и AB или D и AB. Таким образом, это довольно простой расчет "расстояния между точкой и линией" (если расстояния одинаковы, то линии параллельны).
этот сайт объясняет алгоритм расстояния между точкой и линией довольно хорошо.
Это немного сложнее в 3-х измерениях, потому что линии не обязательно в одной плоскости, но здесь, похоже, это не так?
Это мое решение в Python. Работает с 3d точек, и вы можете упростить для 2d.
[EDIT 1] я добавил опцию зажима, если вы хотите ограничить результаты сегментами линии
[EDIT 2] Как отметил Д. А., поскольку две линии параллельны, это не означает, что между ними не может быть расстояния. Поэтому я отредактировал код, чтобы справиться с этой ситуацией. Я также сделал условия зажима более общими, поэтому каждый сегмент может быть зажат с любой стороны.
[EDIT 3] адресовано ошибка jhutar указал, что может произойти, когда обе линии зажаты условия и прогнозируемые результаты выходят за пределы сегментов линии.
import numpy as np
def closestDistanceBetweenLines(a0,a1,b0,b1,clampAll=False,clampA0=False,clampA1=False,clampB0=False,clampB1=False):
''' Given two lines defined by numpy.array pairs (a0,a1,b0,b1)
Return the closest points on each segment and their distance
'''
# If clampAll=True, set all clamps to True
if clampAll:
clampA0=True
clampA1=True
clampB0=True
clampB1=True
# Calculate denomitator
A = a1 - a0
B = b1 - b0
magA = np.linalg.norm(A)
magB = np.linalg.norm(B)
_A = A / magA
_B = B / magB
cross = np.cross(_A, _B);
denom = np.linalg.norm(cross)**2
# If lines are parallel (denom=0) test if lines overlap.
# If they don't overlap then there is a closest point solution.
# If they do overlap, there are infinite closest positions, but there is a closest distance
if not denom:
d0 = np.dot(_A,(b0-a0))
# Overlap only possible with clamping
if clampA0 or clampA1 or clampB0 or clampB1:
d1 = np.dot(_A,(b1-a0))
# Is segment B before A?
if d0 <= 0 >= d1:
if clampA0 and clampB1:
if np.absolute(d0) < np.absolute(d1):
return a0,b0,np.linalg.norm(a0-b0)
return a0,b1,np.linalg.norm(a0-b1)
# Is segment B after A?
elif d0 >= magA <= d1:
if clampA1 and clampB0:
if np.absolute(d0) < np.absolute(d1):
return a1,b0,np.linalg.norm(a1-b0)
return a1,b1,np.linalg.norm(a1-b1)
# Segments overlap, return distance between parallel segments
return None,None,np.linalg.norm(((d0*_A)+a0)-b0)
# Lines criss-cross: Calculate the projected closest points
t = (b0 - a0);
detA = np.linalg.det([t, _B, cross])
detB = np.linalg.det([t, _A, cross])
t0 = detA/denom;
t1 = detB/denom;
pA = a0 + (_A * t0) # Projected closest point on segment A
pB = b0 + (_B * t1) # Projected closest point on segment B
# Clamp projections
if clampA0 or clampA1 or clampB0 or clampB1:
if clampA0 and t0 < 0:
pA = a0
elif clampA1 and t0 > magA:
pA = a1
if clampB0 and t1 < 0:
pB = b0
elif clampB1 and t1 > magB:
pB = b1
# Clamp projection A
if (clampA0 and t0 < 0) or (clampA1 and t0 > magA):
dot = np.dot(_B,(pA-b0))
if clampB0 and dot < 0:
dot = 0
elif clampB1 and dot > magB:
dot = magB
pB = b0 + (_B * dot)
# Clamp projection B
if (clampB0 and t1 < 0) or (clampB1 and t1 > magB):
dot = np.dot(_A,(pB-a0))
if clampA0 and dot < 0:
dot = 0
elif clampA1 and dot > magA:
dot = magA
pA = a0 + (_A * dot)
return pA,pB,np.linalg.norm(pA-pB)
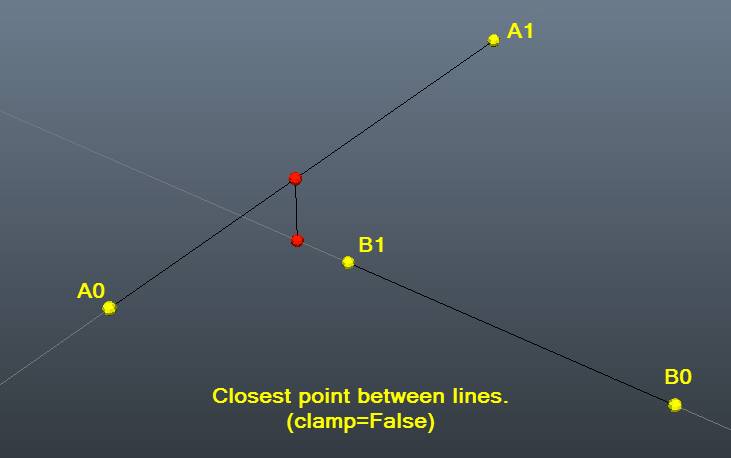
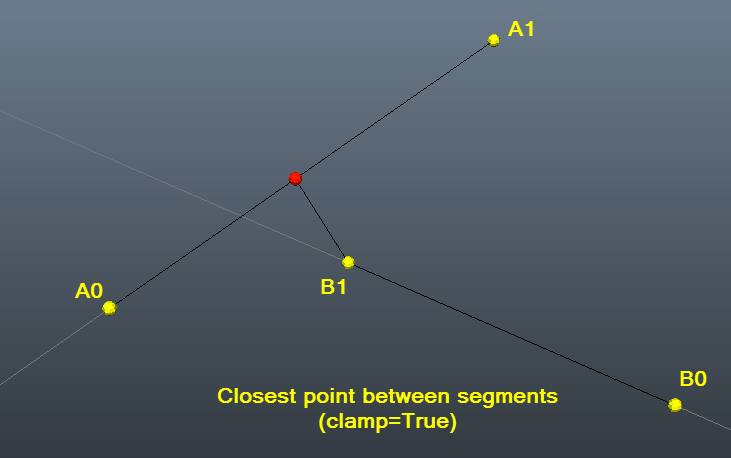
тестовый пример с картинками, чтобы помочь визуализировать:)
a1=np.array([13.43, 21.77, 46.81])
a0=np.array([27.83, 31.74, -26.60])
b0=np.array([77.54, 7.53, 6.22])
b1=np.array([26.99, 12.39, 11.18])
closestDistanceBetweenLines(a0,a1,b0,b1,clampAll=True)
# Result: (15.826771412132246, array([ 19.85163563, 26.21609078, 14.07303667]), array([ 26.99, 12.39, 11.18])) #
closestDistanceBetweenLines(a0,a1,b0,b1,clampAll=False)
# Result: (13.240709703623203, array([ 19.85163563, 26.21609078, 14.07303667]), array([ 18.40058604, 13.21580716, 12.02279907])) #
принято от , который также поставляется с простым объяснением того, почему он работает, а также VB-код (это делает больше, чем вам нужно, поэтому я упростил, как я перевел на Python-примечание: Я перевел, но не тестировал, поэтому опечатка могла проскользнуть мимо...):
def segments_distance(x11, y11, x12, y12, x21, y21, x22, y22):
""" distance between two segments in the plane:
one segment is (x11, y11) to (x12, y12)
the other is (x21, y21) to (x22, y22)
"""
if segments_intersect(x11, y11, x12, y12, x21, y21, x22, y22): return 0
# try each of the 4 vertices w/the other segment
distances = []
distances.append(point_segment_distance(x11, y11, x21, y21, x22, y22))
distances.append(point_segment_distance(x12, y12, x21, y21, x22, y22))
distances.append(point_segment_distance(x21, y21, x11, y11, x12, y12))
distances.append(point_segment_distance(x22, y22, x11, y11, x12, y12))
return min(distances)
def segments_intersect(x11, y11, x12, y12, x21, y21, x22, y22):
""" whether two segments in the plane intersect:
one segment is (x11, y11) to (x12, y12)
the other is (x21, y21) to (x22, y22)
"""
dx1 = x12 - x11
dy1 = y12 - y11
dx2 = x22 - x21
dy2 = y22 - y21
delta = dx2 * dy1 - dy2 * dx1
if delta == 0: return False # parallel segments
s = (dx1 * (y21 - y11) + dy1 * (x11 - x21)) / delta
t = (dx2 * (y11 - y21) + dy2 * (x21 - x11)) / (-delta)
return (0 <= s <= 1) and (0 <= t <= 1)
import math
def point_segment_distance(px, py, x1, y1, x2, y2):
dx = x2 - x1
dy = y2 - y1
if dx == dy == 0: # the segment's just a point
return math.hypot(px - x1, py - y1)
# Calculate the t that minimizes the distance.
t = ((px - x1) * dx + (py - y1) * dy) / (dx * dx + dy * dy)
# See if this represents one of the segment's
# end points or a point in the middle.
if t < 0:
dx = px - x1
dy = py - y1
elif t > 1:
dx = px - x2
dy = py - y2
else:
near_x = x1 + t * dx
near_y = y1 + t * dy
dx = px - near_x
dy = py - near_y
return math.hypot(dx, dy)
для вычисления минимального расстояния между 2 2D сегментами линии верно, что вам нужно выполнить 4 перпендикулярных расстояния от конечной точки до другой линии, последовательно используя каждую из 4 конечных точек. Однако если вы обнаружите, что вытянутая перпендикулярная линия не пересекает сегмент линии ни в одном из 4 случаев, вам нужно выполнить 4 дополнительные проверки расстояния до конечной точки, чтобы найти кратчайшее расстояние.
есть ли более элегантное решение этого я не знаю.
мое решение-это перевод решения Fnord. Я делаю в javascript и C.
В Javascript. Вы должны включить mathjs.
var closestDistanceBetweenLines = function(a0, a1, b0, b1, clampAll, clampA0, clampA1, clampB0, clampB1){
//Given two lines defined by numpy.array pairs (a0,a1,b0,b1)
//Return distance, the two closest points, and their average
clampA0 = clampA0 || false;
clampA1 = clampA1 || false;
clampB0 = clampB0 || false;
clampB1 = clampB1 || false;
clampAll = clampAll || false;
if(clampAll){
clampA0 = true;
clampA1 = true;
clampB0 = true;
clampB1 = true;
}
//Calculate denomitator
var A = math.subtract(a1, a0);
var B = math.subtract(b1, b0);
var _A = math.divide(A, math.norm(A))
var _B = math.divide(B, math.norm(B))
var cross = math.cross(_A, _B);
var denom = math.pow(math.norm(cross), 2);
//If denominator is 0, lines are parallel: Calculate distance with a projection and evaluate clamp edge cases
if (denom == 0){
var d0 = math.dot(_A, math.subtract(b0, a0));
var d = math.norm(math.subtract(math.add(math.multiply(d0, _A), a0), b0));
//If clamping: the only time we'll get closest points will be when lines don't overlap at all. Find if segments overlap using dot products.
if(clampA0 || clampA1 || clampB0 || clampB1){
var d1 = math.dot(_A, math.subtract(b1, a0));
//Is segment B before A?
if(d0 <= 0 && 0 >= d1){
if(clampA0 == true && clampB1 == true){
if(math.absolute(d0) < math.absolute(d1)){
return [b0, a0, math.norm(math.subtract(b0, a0))];
}
return [b1, a0, math.norm(math.subtract(b1, a0))];
}
}
//Is segment B after A?
else if(d0 >= math.norm(A) && math.norm(A) <= d1){
if(clampA1 == true && clampB0 == true){
if(math.absolute(d0) < math.absolute(d1)){
return [b0, a1, math.norm(math.subtract(b0, a1))];
}
return [b1, a1, math.norm(math.subtract(b1,a1))];
}
}
}
//If clamping is off, or segments overlapped, we have infinite results, just return position.
return [null, null, d];
}
//Lines criss-cross: Calculate the dereminent and return points
var t = math.subtract(b0, a0);
var det0 = math.det([t, _B, cross]);
var det1 = math.det([t, _A, cross]);
var t0 = math.divide(det0, denom);
var t1 = math.divide(det1, denom);
var pA = math.add(a0, math.multiply(_A, t0));
var pB = math.add(b0, math.multiply(_B, t1));
//Clamp results to line segments if needed
if(clampA0 || clampA1 || clampB0 || clampB1){
if(t0 < 0 && clampA0)
pA = a0;
else if(t0 > math.norm(A) && clampA1)
pA = a1;
if(t1 < 0 && clampB0)
pB = b0;
else if(t1 > math.norm(B) && clampB1)
pB = b1;
}
var d = math.norm(math.subtract(pA, pB))
return [pA, pB, d];
}
//example
var a1=[13.43, 21.77, 46.81];
var a0=[27.83, 31.74, -26.60];
var b0=[77.54, 7.53, 6.22];
var b1=[26.99, 12.39, 11.18];
closestDistanceBetweenLines(a0,a1,b0,b1,true);
в чистом C
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
double determinante3(double* a, double* v1, double* v2){
return a[0] * (v1[1] * v2[2] - v1[2] * v2[1]) + a[1] * (v1[2] * v2[0] - v1[0] * v2[2]) + a[2] * (v1[0] * v2[1] - v1[1] * v2[0]);
}
double* cross3(double* v1, double* v2){
double* v = (double*)malloc(3 * sizeof(double));
v[0] = v1[1] * v2[2] - v1[2] * v2[1];
v[1] = v1[2] * v2[0] - v1[0] * v2[2];
v[2] = v1[0] * v2[1] - v1[1] * v2[0];
return v;
}
double dot3(double* v1, double* v2){
return v1[0] * v2[0] + v1[1] * v2[1] + v1[2] * v2[2];
}
double norma3(double* v1){
double soma = 0;
for (int i = 0; i < 3; i++) {
soma += pow(v1[i], 2);
}
return sqrt(soma);
}
double* multiplica3(double* v1, double v){
double* v2 = (double*)malloc(3 * sizeof(double));
for (int i = 0; i < 3; i++) {
v2[i] = v1[i] * v;
}
return v2;
}
double* soma3(double* v1, double* v2, int sinal){
double* v = (double*)malloc(3 * sizeof(double));
for (int i = 0; i < 3; i++) {
v[i] = v1[i] + sinal * v2[i];
}
return v;
}
Result_distance* closestDistanceBetweenLines(double* a0, double* a1, double* b0, double* b1, int clampAll, int clampA0, int clampA1, int clampB0, int clampB1){
double denom, det0, det1, t0, t1, d;
double *A, *B, *_A, *_B, *cross, *t, *pA, *pB;
Result_distance *rd = (Result_distance *)malloc(sizeof(Result_distance));
if (clampAll){
clampA0 = 1;
clampA1 = 1;
clampB0 = 1;
clampB1 = 1;
}
A = soma3(a1, a0, -1);
B = soma3(b1, b0, -1);
_A = multiplica3(A, 1 / norma3(A));
_B = multiplica3(B, 1 / norma3(B));
cross = cross3(_A, _B);
denom = pow(norma3(cross), 2);
if (denom == 0){
double d0 = dot3(_A, soma3(b0, a0, -1));
d = norma3(soma3(soma3(multiplica3(_A, d0), a0, 1), b0, -1));
if (clampA0 || clampA1 || clampB0 || clampB1){
double d1 = dot3(_A, soma3(b1, a0, -1));
if (d0 <= 0 && 0 >= d1){
if (clampA0 && clampB1){
if (abs(d0) < abs(d1)){
rd->pA = b0;
rd->pB = a0;
rd->d = norma3(soma3(b0, a0, -1));
}
else{
rd->pA = b1;
rd->pB = a0;
rd->d = norma3(soma3(b1, a0, -1));
}
}
}
else if (d0 >= norma3(A) && norma3(A) <= d1){
if (clampA1 && clampB0){
if (abs(d0) <abs(d1)){
rd->pA = b0;
rd->pB = a1;
rd->d = norma3(soma3(b0, a1, -1));
}
else{
rd->pA = b1;
rd->pB = a1;
rd->d = norma3(soma3(b1, a1, -1));
}
}
}
}
else{
rd->pA = NULL;
rd->pB = NULL;
rd->d = d;
}
}
else{
t = soma3(b0, a0, -1);
det0 = determinante3(t, _B, cross);
det1 = determinante3(t, _A, cross);
t0 = det0 / denom;
t1 = det1 / denom;
pA = soma3(a0, multiplica3(_A, t0), 1);
pB = soma3(b0, multiplica3(_B, t1), 1);
if (clampA0 || clampA1 || clampB0 || clampB1){
if (t0 < 0 && clampA0)
pA = a0;
else if (t0 > norma3(A) && clampA1)
pA = a1;
if (t1 < 0 && clampB0)
pB = b0;
else if (t1 > norma3(B) && clampB1)
pB = b1;
}
d = norma3(soma3(pA, pB, -1));
rd->pA = pA;
rd->pB = pB;
rd->d = d;
}
free(A);
free(B);
free(cross);
free(t);
return rd;
}
int main(void){
//example
double a1[] = { 13.43, 21.77, 46.81 };
double a0[] = { 27.83, 31.74, -26.60 };
double b0[] = { 77.54, 7.53, 6.22 };
double b1[] = { 26.99, 12.39, 11.18 };
Result_distance* rd = closestDistanceBetweenLines(a0, a1, b0, b1, 1, 0, 0, 0, 0);
printf("pA = [%f, %f, %f]\n", rd->pA[0], rd->pA[1], rd->pA[2]);
printf("pB = [%f, %f, %f]\n", rd->pB[0], rd->pB[1], rd->pB[2]);
printf("d = %f\n", rd->d);
return 0;
}
обратите внимание, что вышеуказанные решения верны в предположении, что отрезки линии не пересекаются! Если отрезки пересекаются, понятно, что их расстояние должно быть 0. Поэтому необходимо провести последнюю проверку: предположим, что расстояние между точкой A и CD, d(A,CD), было наименьшим из 4 проверок, упомянутых Дином. Затем сделайте небольшой шаг вдоль сегмента AB из точки A. обозначьте эту точку E. Если D(E,CD)
это решение, по сути, от Алекса Мартелли, но я добавил класс Point и LineSegment, чтобы облегчить чтение. Я также скорректировал форматирование и добавил некоторые тесты.
пересечение отрезков линии неверно, но, похоже, это не имеет значения для расчета расстояния отрезков линии. Если вас интересует правильное пересечение отрезка линии, посмотрите здесь:как вы определяете, есть ли два сегмента линии интерсект?
#!/usr/bin/env python
"""Calculate the distance between line segments."""
import math
class Point(object):
"""A two dimensional point."""
def __init__(self, x, y):
self.x = float(x)
self.y = float(y)
class LineSegment(object):
"""A line segment in a two dimensional space."""
def __init__(self, p1, p2):
assert isinstance(p1, Point), \
"p1 is not of type Point, but of %r" % type(p1)
assert isinstance(p2, Point), \
"p2 is not of type Point, but of %r" % type(p2)
self.p1 = p1
self.p2 = p2
def segments_distance(segment1, segment2):
"""Calculate the distance between two line segments in the plane.
>>> a = LineSegment(Point(1,0), Point(2,0))
>>> b = LineSegment(Point(0,1), Point(0,2))
>>> "%0.2f" % segments_distance(a, b)
'1.41'
>>> c = LineSegment(Point(0,0), Point(5,5))
>>> d = LineSegment(Point(2,2), Point(4,4))
>>> e = LineSegment(Point(2,2), Point(7,7))
>>> "%0.2f" % segments_distance(c, d)
'0.00'
>>> "%0.2f" % segments_distance(c, e)
'0.00'
"""
if segments_intersect(segment1, segment2):
return 0
# try each of the 4 vertices w/the other segment
distances = []
distances.append(point_segment_distance(segment1.p1, segment2))
distances.append(point_segment_distance(segment1.p2, segment2))
distances.append(point_segment_distance(segment2.p1, segment1))
distances.append(point_segment_distance(segment2.p2, segment1))
return min(distances)
def segments_intersect(segment1, segment2):
"""Check if two line segments in the plane intersect.
>>> segments_intersect(LineSegment(Point(0,0), Point(1,0)), \
LineSegment(Point(0,0), Point(1,0)))
True
"""
dx1 = segment1.p2.x - segment1.p1.x
dy1 = segment1.p2.y - segment1.p2.y
dx2 = segment2.p2.x - segment2.p1.x
dy2 = segment2.p2.y - segment2.p1.y
delta = dx2 * dy1 - dy2 * dx1
if delta == 0: # parallel segments
# TODO: Could be (partially) identical!
return False
s = (dx1 * (segment2.p1.y - segment1.p1.y) +
dy1 * (segment1.p1.x - segment2.p1.x)) / delta
t = (dx2 * (segment1.p1.y - segment2.p1.y) +
dy2 * (segment2.p1.x - segment1.p1.x)) / (-delta)
return (0 <= s <= 1) and (0 <= t <= 1)
def point_segment_distance(point, segment):
"""
>>> a = LineSegment(Point(1,0), Point(2,0))
>>> b = LineSegment(Point(2,0), Point(0,2))
>>> point_segment_distance(Point(0,0), a)
1.0
>>> "%0.2f" % point_segment_distance(Point(0,0), b)
'1.41'
"""
assert isinstance(point, Point), \
"point is not of type Point, but of %r" % type(point)
dx = segment.p2.x - segment.p1.x
dy = segment.p2.y - segment.p1.y
if dx == dy == 0: # the segment's just a point
return math.hypot(point.x - segment.p1.x, point.y - segment.p1.y)
if dx == 0:
if (point.y <= segment.p1.y or point.y <= segment.p2.y) and \
(point.y >= segment.p2.y or point.y >= segment.p2.y):
return abs(point.x - segment.p1.x)
if dy == 0:
if (point.x <= segment.p1.x or point.x <= segment.p2.x) and \
(point.x >= segment.p2.x or point.x >= segment.p2.x):
return abs(point.y - segment.p1.y)
# Calculate the t that minimizes the distance.
t = ((point.x - segment.p1.x) * dx + (point.y - segment.p1.y) * dy) / \
(dx * dx + dy * dy)
# See if this represents one of the segment's
# end points or a point in the middle.
if t < 0:
dx = point.x - segment.p1.x
dy = point.y - segment.p1.y
elif t > 1:
dx = point.x - segment.p2.x
dy = point.y - segment.p2.y
else:
near_x = segment.p1.x + t * dx
near_y = segment.p1.y + t * dy
dx = point.x - near_x
dy = point.y - near_y
return math.hypot(dx, dy)
if __name__ == '__main__':
import doctest
doctest.testmod()
все 2D-линии, если они не параллельны, в конечном итоге встретятся. Узнайте, чему вас учат, чтобы понять это, а не пытаться обмануть этот конкретный q.