Плохая карта диспаритета с использованием StereoBM в OpenCV
я собрал стереокамеру, и у меня возникли проблемы с ее использованием, чтобы создать хорошую карту несоответствия. Вот пример двух исправленных изображений и карты несоответствия, которую я создал с ними:
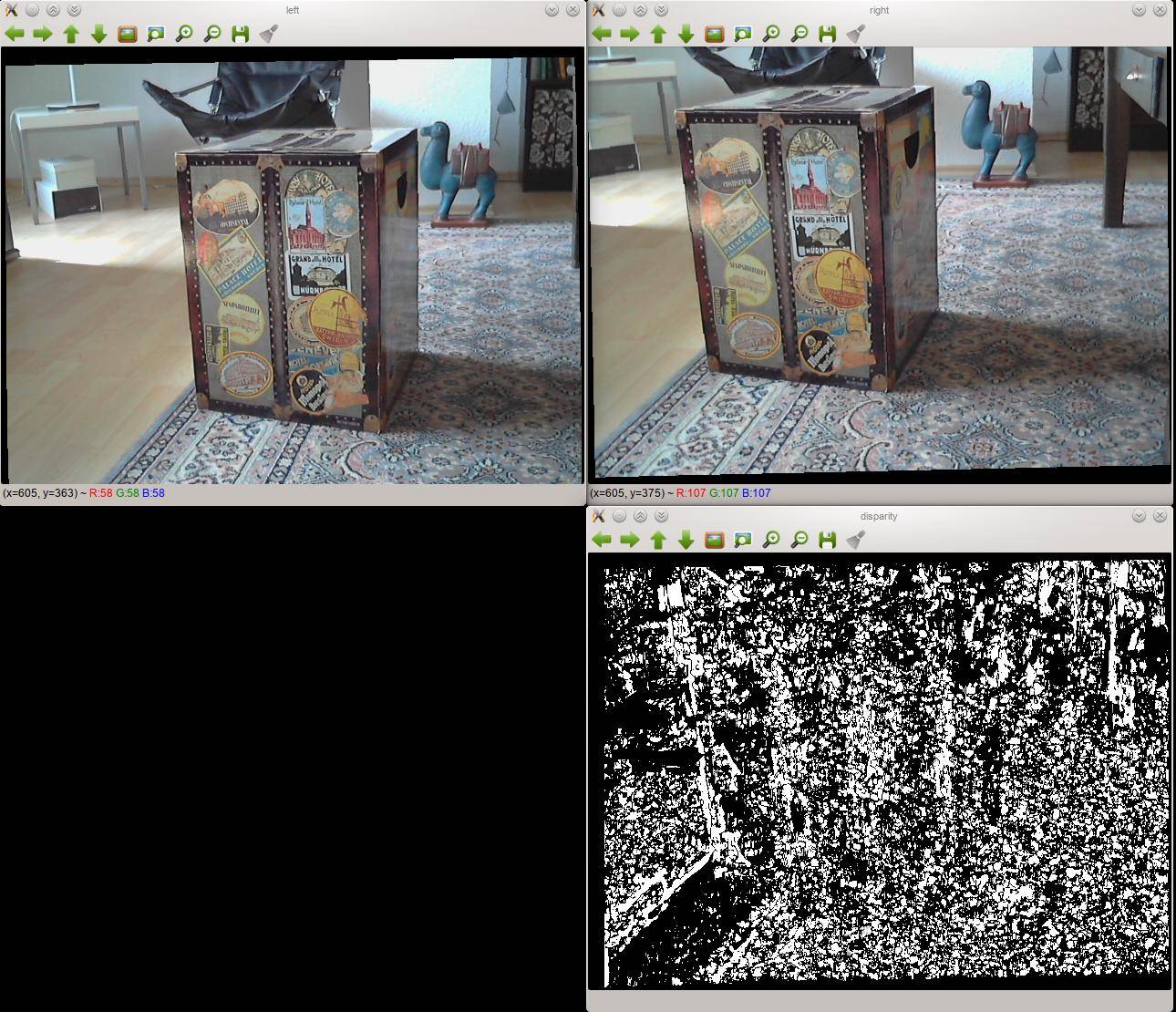
как вы можете видеть, результаты довольно плохие. Изменение настроек StereoBM не сильно меняется.
настройки
- обе камеры одной модели и подключаются к моему компьютеру с помощью USB.
- они закреплены на жесткой деревянной доске, так что они не двигаются. Я выровнял их, как мог, но, конечно, это не идеально. Они неспособны двинуть, поэтому их положения во время и после тарировки эти же.
- я откалибровал стереопару с помощью OpenCV и использую OpenCV
StereoBMкласс для создания карты несоответствий. - это, вероятно, не так важно, но я кодирую на Python.
проблемы я мог представьте
Я делаю это в первый раз, поэтому я далек от того, чтобы быть экспертом, но я предполагаю, что проблема заключается в калибровке или в стерео выпрямлении, а не в вычислении карты несоответствия. Я пробовал все перестановки настроек для StereoBM и, хотя я получаю разные результаты, все они похожи на карту несоответствия, показанную выше: пятна черного и белого.
эта идея подкрепляется тем, что, как я понимаю, стерео выпрямление должно выровнять все точки На каждом изображении так, чтобы они были соединены прямой (в моем случае горизонтальной) линией. Если я рассматриваю оба исправленных изображения рядом друг с другом, сразу становится очевидно, что это не так. Соответствующие точки намного выше на правой картинке, чем на левой. Я не уверен, является ли калибровка или исправление проблемой.
код
фактический код завернут в объекты - в случае, если вы заинтересованы в том, чтобы увидеть его во всей его полноте, он доступен на GitHub. Вот упрощенный пример того, что на самом деле выполняется (конечно, в реальном коде, который я калибрую, используя более 2 фотографий):
import cv2
import numpy as np
## Load test images
# TEST_IMAGES is a list of paths to test images
input_l, input_r = [cv2.imread(image, cv2.CV_LOAD_IMAGE_GRAYSCALE)
for image in TEST_IMAGES]
image_size = input_l.shape[:2]
## Retrieve chessboard corners
# CHESSBOARD_ROWS and CHESSBOARD_COLUMNS are the number of inside rows and
# columns in the chessboard used for calibration
pattern_size = CHESSBOARD_ROWS, CHESSBOARD_COLUMNS
object_points = np.zeros((np.prod(pattern_size), 3), np.float32)
object_points[:, :2] = np.indices(pattern_size).T.reshape(-1, 2)
# SQUARE_SIZE is the size of the chessboard squares in cm
object_points *= SQUARE_SIZE
image_points = {}
ret, corners_l = cv2.findChessboardCorners(input_l, pattern_size, True)
cv2.cornerSubPix(input_l, corners_l,
(11, 11), (-1, -1),
(cv2.TERM_CRITERIA_MAX_ITER + cv2.TERM_CRITERIA_EPS,
30, 0.01))
image_points["left"] = corners_l.reshape(-1, 2)
ret, corners_r = cv2.findChessboardCorners(input_r, pattern_size, True)
cv2.cornerSubPix(input_r, corners_r,
(11, 11), (-1, -1),
(cv2.TERM_CRITERIA_MAX_ITER + cv2.TERM_CRITERIA_EPS,
30, 0.01))
image_points["right"] = corners_r.reshape(-1, 2)
## Calibrate cameras
(cam_mats, dist_coefs, rect_trans, proj_mats, valid_boxes,
undistortion_maps, rectification_maps) = {}, {}, {}, {}, {}, {}, {}
criteria = (cv2.TERM_CRITERIA_MAX_ITER + cv2.TERM_CRITERIA_EPS,
100, 1e-5)
flags = (cv2.CALIB_FIX_ASPECT_RATIO + cv2.CALIB_ZERO_TANGENT_DIST +
cv2.CALIB_SAME_FOCAL_LENGTH)
(ret, cam_mats["left"], dist_coefs["left"], cam_mats["right"],
dist_coefs["right"], rot_mat, trans_vec, e_mat,
f_mat) = cv2.stereoCalibrate(object_points,
image_points["left"], image_points["right"],
image_size, criteria=criteria, flags=flags)
(rect_trans["left"], rect_trans["right"],
proj_mats["left"], proj_mats["right"],
disp_to_depth_mat, valid_boxes["left"],
valid_boxes["right"]) = cv2.stereoRectify(cam_mats["left"],
dist_coefs["left"],
cam_mats["right"],
dist_coefs["right"],
image_size,
rot_mat, trans_vec, flags=0)
for side in ("left", "right"):
(undistortion_maps[side],
rectification_maps[side]) = cv2.initUndistortRectifyMap(cam_mats[side],
dist_coefs[side],
rect_trans[side],
proj_mats[side],
image_size,
cv2.CV_32FC1)
## Produce disparity map
rectified_l = cv2.remap(input_l, undistortion_maps["left"],
rectification_maps["left"],
cv2.INTER_NEAREST)
rectified_r = cv2.remap(input_r, undistortion_maps["right"],
rectification_maps["right"],
cv2.INTER_NEAREST)
cv2.imshow("left", rectified_l)
cv2.imshow("right", rectified_r)
block_matcher = cv2.StereoBM(cv2.STEREO_BM_BASIC_PRESET, 0, 5)
disp = block_matcher.compute(rectified_l, rectified_r, disptype=cv2.CV_32F)
cv2.imshow("disparity", disp)
что здесь не так?
1 ответов
оказалось, что проблема была в визуализации, а не в самих данных. Где-то я читал, что cv2.reprojectImageTo3D требуется карта несоответствия в качестве значений с плавающей запятой, поэтому я запрашивал cv2.CV_32F С block_matcher.compute.
чтение документации OpenCV более тщательно привело меня к мысли, что я думал об этом по ошибке, и я действительно хотел бы работать с целыми числами, чем поплавки ради скорости, но документация для cv2.imshow не понятно, что он делает с 16 бит целые числа со знаком (по сравнению с 16 битами без знака), поэтому для визуализации я оставляю значения как поплавки.
на документация cv2.imshow показывает, что 32-битные значения с плавающей запятой считаются между 0 и 1, поэтому они умножаются на 255. 255-это точка насыщения, в которой пиксель отображается белым цветом. В моем случае это предположение привело к двоичной карте. Я вручную масштабировал его до диапазона 0-255, а затем разделил его на 255, чтобы отменить факт, что OpenCV делает то же самое. Я знаю, это ужасная работа, но я делаю это только для того, чтобы настроить мой StereoBM offline поэтому производительность некритична. Решение выглядит следующим образом:
# Other code as above
disp = block_matcher.compute(rectified_l, rectified_r, disptype=cv2.CV_32F)
norm_coeff = 255 / disp.max()
cv2.imshow("disparity", disp * norm_coeff / 255)
тогда карта несоответствия выглядит нормально.