Преобразование изображений OpenCV и изменение перспективы
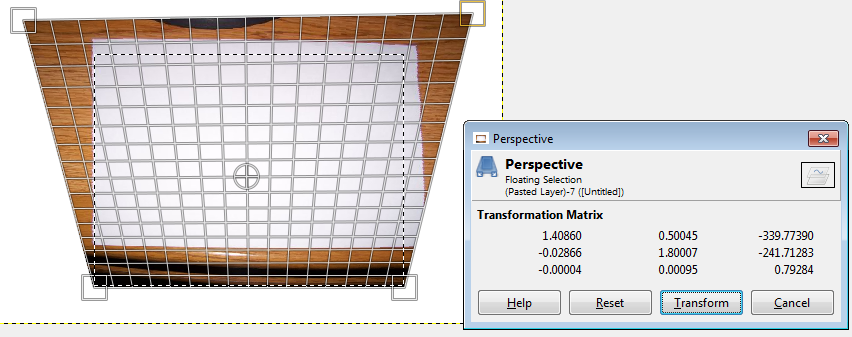
Я пытаюсь достичь следующего эффекта, показанного здесь, используя инструмент перспективы в GIMP.
исходное изображение (620x466 пикселей)
преобразование изображения
у меня есть фиксированная веб-камера и я хотел бы подключить вышеуказанные матричные фигуры преобразования, что приводит к трапециевидной форме неискаженного вывода.
Я знаю, что есть и другие опции, доступные для undistort изображений в OpenCV, но я бы очень хотел предоставить фигуры матрицы преобразования вручную, в то время как в конечном итоге трапециевидное изображение.
от чтения вокруг у меня есть чувство warpPerspective, findHomography или getPerspectiveTransform может быть полезно, но не уверен, как это сделать в C++
любой полезный совет был бы весьма признателен.
пробовал работать со следующим кодом, но я получаю только окно с 1 пикселем показ.
может быть, так, как я указал точки в пикселях, это правильно?
#include <opencv2/core/core.hpp>
#include <opencv2/opencv.hpp>
#include <cv.h>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
cv::Mat OpenWarpPerspective(const cv::Mat& _image
, const cv::Point2f& _lu
, const cv::Point2f& _ru
, const cv::Point2f& _rd
, const cv::Point2f& _ld
, const cv::Point2f& _lu_result
, const cv::Point2f& _ru_result
, const cv::Point2f& _rd_result
, const cv::Point2f& _ld_result
, cv::Mat& _transform_matrix)
{
// todo do some checks on input.
cv::Point2f source_points[4];
cv::Point2f dest_points[4];
source_points[0] = _lu;
source_points[1] = _ru;
source_points[2] = _rd;
source_points[3] = _ld;
dest_points[0] = _lu_result;
dest_points[1] = _ru_result;
dest_points[2] = _rd_result;
dest_points[3] = _ld_result;
cv::Mat dst;
_transform_matrix = cv::getPerspectiveTransform(source_points, dest_points);
cv::warpPerspective(_image, dst, _transform_matrix, dst.size());
return dst;
}
int main( int argc, char** argv )
{
Mat image;
Mat edited;
image = imread("c:/org.png", CV_LOAD_IMAGE_COLOR); // Read the file
namedWindow( "Display window", CV_WINDOW_AUTOSIZE );// Create a window for display.
Point2f one = (0.0, 0.0);
Point2f two = (317.0, 0.0);
Point2f three = (317.0, 240.0);
Point2f four = (0.0, 240.0);
Point2f five = (-100.0, 0.0);
Point2f six = (617.0, 0.0);
Point2f seven = (317.0, 240.0);
Point2f eight = (0.0, 240.0);
OpenWarpPerspective(image,one,two,three,four,five,six,seven,eight,edited);
imshow( "Display window", edited ); // Show our image inside it.
waitKey(0); // Wait for a keystroke in the window
return 0;
}
3 ответов
Если у вас есть три угловые точки, используйте Warp Affine transform. Если у вас есть четыре угловые точки, используйте преобразование перспективы деформации. Вот как вы должны использовать преобразование перспективы Warp. Выберите четыре угловые точки изображения. Затем выберите четыре соответствующие точки нужного прямоугольника. Варп-трансформация сделает все остальное.
cv::Mat OpenWarpPerspective(const cv::Mat& _image
, const cv::Point2f& _lu
, const cv::Point2f& _ru
, const cv::Point2f& _rd
, const cv::Point2f& _ld
, const cv::Point2f& _lu_result
, const cv::Point2f& _ru_result
, const cv::Point2f& _rd_result
, const cv::Point2f& _ld_result
, cv::Mat& _transform_matrix)
{
// todo do some checks on input.
cv::Point2f source_points[4];
cv::Point2f dest_points[4];
source_points[0] = _lu;
source_points[1] = _ru;
source_points[2] = _rd;
source_points[3] = _ld;
dest_points[0] = _lu_result;
dest_points[1] = _ru_result;
dest_points[2] = _rd_result;
dest_points[3] = _ld_result;
cv::Mat dst;
_transform_matrix = cv::getPerspectiveTransform(source_points, dest_points);
cv::warpPerspective(_image, dst, _transform_matrix, cv::Size(_width, _height));
return dst;
}
Следующие Работы: Пожалуйста, исправьте координаты на входном изображении, я не понял.
#include <opencv2/core/core.hpp>
#include <opencv2/opencv.hpp>
//#include "cv.hpp"
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
using namespace cv;
using namespace std;
cv::Mat OpenWarpPerspective(const cv::Mat& _image
, const cv::Point2f& _lu
, const cv::Point2f& _ru
, const cv::Point2f& _rd
, const cv::Point2f& _ld
, const cv::Point2f& _lu_result
, const cv::Point2f& _ru_result
, const cv::Point2f& _rd_result
, const cv::Point2f& _ld_result
)
{
// todo do some checks on input.
cv::Point2f source_points[4];
cv::Point2f dest_points[4];
cv::Mat _transform_matrix;
source_points[0] = _lu;
source_points[1] = _ru;
source_points[2] = _rd;
source_points[3] = _ld;
dest_points[0] = _lu_result;
dest_points[1] = _ru_result;
dest_points[2] = _rd_result;
dest_points[3] = _ld_result;
cv::Mat dst = _image.clone();
_transform_matrix = cv::getPerspectiveTransform(source_points, dest_points);
cv::warpPerspective(_image, dst, _transform_matrix, dst.size());
return dst;
}
int main(int argc, char** argv)
{
Mat image;
Mat edited;
image = imread("img.png", CV_LOAD_IMAGE_COLOR); // Read the file // original image(620x466 pixels)
imshow("InputImage", image);
waitKey(0);
Point2f one = (0.0, 0.0);
Point2f two = (500.0, 0.0);
Point2f three = (500.0, 100.0);
Point2f four = (250.0, 100.0);
Point2f five = (250.0, 0.0);
Point2f six = (500.0, 0.0);
Point2f seven = (500.0, 1000.0);
Point2f eight = (250.0, 100.0);
edited= OpenWarpPerspective(image, one, two, three, four, five, six, seven, eight);
namedWindow("Display window", CV_WINDOW_AUTOSIZE);// Create a window for display.
imshow("Display window", edited); // Show our image inside it.
waitKey(0); // Wait for a keystroke in the window
return 0;
}