Простое обнаружение объектов с использованием OpenCV и машинного обучения
Я должен закодировать детектор объектов (в данном случае мяч) с помощью OpenCV. Проблема в том, что каждый поиск в google возвращает мне что-то с обнаружением лица. Поэтому мне нужна помощь в том, с чего начать, что использовать и т. д..
информация:
- мяч не имеет фиксированного цвета, он, вероятно, будет белым, но он может измениться.
- Я должен использовать машинное обучение, не должен быть сложным и надежным, предложение-KNN (это способ проще и проще).
- после всех моих поисков я обнаружил, что вычисление гистограммы образцов шаровых изображений и обучение ее ML может быть полезно, но моя главная забота здесь заключается в том, что размер шара может и будет меняться (ближе и дальше от камеры), и я понятия не имею, что передать ML для классификации для меня, я имею в виду.. я не могу (или могу?) просто проверьте каждый пиксель изображения на любой возможный размер (от, скажем, 5x5 до WxH) и надеемся найти положительный результат.
- может быть неоднородный фон, как люди, ткань за мячом и т. д..
- как я уже сказал, я должен использовать алгоритм ML, что означает отсутствие алгоритмов Haar или Viola.
-
кроме того, я думал об использовании контуров для поиска кругов на изображении Canny'Ed, просто нужно найти способ преобразовать контур в строку данных, чтобы научить KNN.
Так... предложения?
спасибо заранее. ;)
1 ответов
Ну, в основном вам нужно обнаружить кружки. Вы видели cvHoughCircles()? Вам разрешено им пользоваться?
эта страница имеет хорошую информацию о том, как обнаружение вещей с OpenCV. Вы могли бы быть более заинтересованы на 2.5.
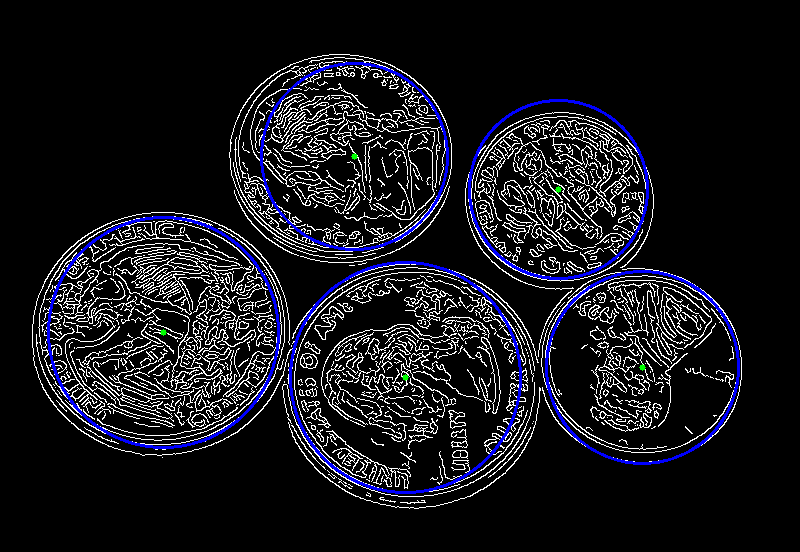
Это небольшая демонстрация, которую я только что написал, чтобы обнаружить монеты На этой картинке. Надеюсь, вы можете использовать некоторую часть кода для преимущество.
вход:

выходы:
// compiled with: g++ circles.cpp -o circles `pkg-config --cflags --libs opencv`
#include <stdio.h>
#include <cv.h>
#include <highgui.h>
#include <math.h>
int main(int argc, char** argv)
{
IplImage* img = NULL;
if ((img = cvLoadImage(argv[1]))== 0)
{
printf("cvLoadImage failed\n");
}
IplImage* gray = cvCreateImage(cvGetSize(img), IPL_DEPTH_8U, 1);
CvMemStorage* storage = cvCreateMemStorage(0);
cvCvtColor(img, gray, CV_BGR2GRAY);
// This is done so as to prevent a lot of false circles from being detected
cvSmooth(gray, gray, CV_GAUSSIAN, 7, 7);
IplImage* canny = cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,1);
IplImage* rgbcanny = cvCreateImage(cvGetSize(img),IPL_DEPTH_8U,3);
cvCanny(gray, canny, 50, 100, 3);
CvSeq* circles = cvHoughCircles(gray, storage, CV_HOUGH_GRADIENT, 1, gray->height/3, 250, 100);
cvCvtColor(canny, rgbcanny, CV_GRAY2BGR);
for (size_t i = 0; i < circles->total; i++)
{
// round the floats to an int
float* p = (float*)cvGetSeqElem(circles, i);
cv::Point center(cvRound(p[0]), cvRound(p[1]));
int radius = cvRound(p[2]);
// draw the circle center
cvCircle(rgbcanny, center, 3, CV_RGB(0,255,0), -1, 8, 0 );
// draw the circle outline
cvCircle(rgbcanny, center, radius+1, CV_RGB(0,0,255), 2, 8, 0 );
printf("x: %d y: %d r: %d\n",center.x,center.y, radius);
}
cvNamedWindow("circles", 1);
cvShowImage("circles", rgbcanny);
cvSaveImage("out.png", rgbcanny);
cvWaitKey(0);
return 0;
}
обнаружение кругов зависит много от параметров cvHoughCircles(). Обратите внимание, что в этой демонстрации я также использовал Canny.