Адаптивный алгоритм порога Брэдли
в настоящее время я работаю над реализацией алгоритма порога под названием Bradley Adaptive Thresholding.
я следовал в основном по двум ссылкам, чтобы выяснить, как реализовать этот алгоритм. Я также успешно смог реализовать два других алгоритма порога, в основном,метод Отсу и Сбалансированная Гистограмма.
вот две ссылки, которые я следовал, чтобы создать Bradley Adaptive Thresholding алгоритм.
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.420.7883&rep=rep1&type=pdf
Пример Адаптивного Порога Брэдли Github
вот раздел моего исходного кода в Python где я запускаю алгоритм и сохраняю изображение. Я использую Python Imaging Library и никаких других инструментов для достижения того, что я хочу сделать.
def get_bradley_binary(inp_im):
w, h = inp_im.size
s, t = (w / 8, 0.15)
int_im = Image.new('L', (w, h))
out_im = Image.new('L', (w, h))
for i in range(w):
summ = 0
for j in range(h):
index = j * w + i
summ += get_pixel_offs(inp_im, index)
if i == 0:
set_pixel_offs(int_im, index, summ)
else:
temp = get_pixel_offs(int_im, index - 1) + summ
set_pixel_offs(int_im, index, temp)
for i in range(w):
for j in range(h):
index = j * w + i
x1,x2,y1,y2 = (i-s/2, i+s/2, j-s/2, j+s/2)
x1 = 0 if x1 < 0 else x1
x2 = w - 1 if x2 >= w else x2
y1 = 0 if y1 < 0 else y1
y2 = h - 1 if y2 >= h else y2
count = (x2 - x1) * (y2 - y1)
a1 = get_pixel_offs(int_im, y2 * w + x2)
a2 = get_pixel_offs(int_im, y1 * w + x2)
a3 = get_pixel_offs(int_im, y2 * w + x1)
a4 = get_pixel_offs(int_im, y1 * w + x1)
summ = a1 - a2 - a3 + a4
temp = get_pixel_offs(inp_im, index)
if temp * count < summ * (1.0 - t):
set_pixel_offs(out_im, index, 0)
else:
set_pixel_offs(out_im, index, 255)
return out_im
вот часть моего кода, который иллюстрирует реализацию эти set и Get методы, которые вы раньше не видели.
def get_offs(image, x, y):
return y * image.size[0] + x
def get_xy(image, offs):
return (offs % image.size[0], int(offs / image.size[0]))
def set_pixel_xy(image, x, y, data):
image.load()[x, y] = data
def set_pixel_offs(image, offs, data):
x, y = get_xy(image, offs)
image.load()[x, y] = data
def get_pixel_offs(image, offs):
return image.getdata()[offs]
def get_pixel_xy(image, x, y):
return image.getdata()[get_offs(image, x, y)]
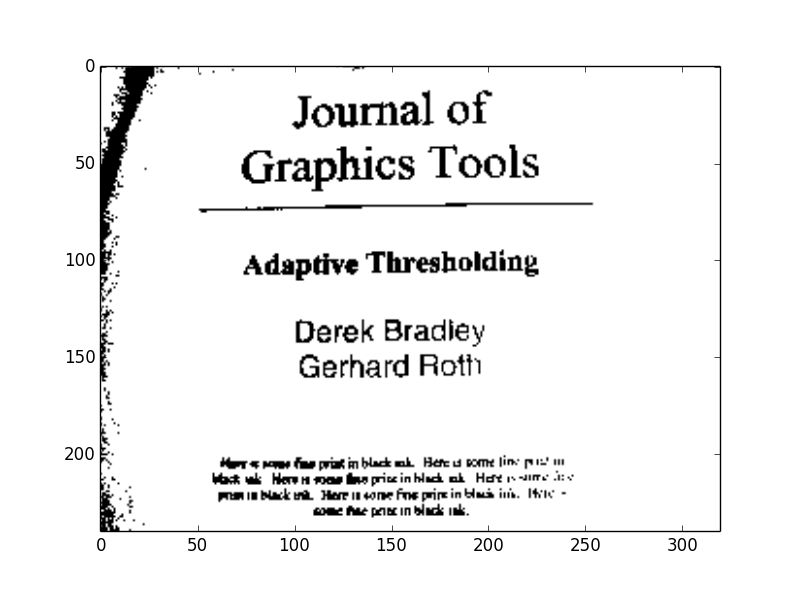
и, наконец, вот входные и выходные изображения. Это те же изображения, которые используются в оригинальной исследовательской работе в первой ссылке, которую я вам предоставил. Примечание: выходное изображение почти полностью белое, и это может быть трудно увидеть, но я предоставил его в любом случае, если кто-то действительно хотел иметь его для справки.

2 ответов
вы не можете создать интегральное изображение с PIL так, как вы это делаете, потому что изображение, в которое вы упаковываете данные, не может принимать значения более 255. Значения в интегральном изображении становятся очень большими, потому что они представляют собой суммы пикселей выше и слева (см. стр. 3 вашей белой книги ниже).

Они будут расти намного больше, чем 255, поэтому нужно 32 бита на пиксель для их хранения.
Вы можете проверить это создав изображение PIL в режиме "L", а затем установив пиксель на 1000000 или некоторое большое число. Затем, когда вы прочитаете значение, оно вернет 255.
>>> from PIL import Image
>>> img = Image.new('L', (100,100))
>>> img.putpixel((0,0), 100000)
>>> print list(img.getdata())[0]
255
EDIT: после прочтения документации PIL вы можете использовать PIL, если создадите свое интегральное изображение в режиме" I "вместо" L". Это должно обеспечить 32 бита на пиксель.
по этой причине я рекомендую Numpy вместо PIL.
Ниже приведена перезапись вашей пороговой функции с помощью Numpy вместо PIL, и я получаю правильный / ожидаемый результат. Обратите внимание, что я создаю свой интегральный образ с помощью массива uint32. Я использовал тот же самый пример C на Github, который вы использовали для своего перевода:
import numpy as np
def adaptive_thresh(input_img):
h, w = input_img.shape
S = w/8
s2 = S/2
T = 15.0
#integral img
int_img = np.zeros_like(input_img, dtype=np.uint32)
for col in range(w):
for row in range(h):
int_img[row,col] = input_img[0:row,0:col].sum()
#output img
out_img = np.zeros_like(input_img)
for col in range(w):
for row in range(h):
#SxS region
y0 = max(row-s2, 0)
y1 = min(row+s2, h-1)
x0 = max(col-s2, 0)
x1 = min(col+s2, w-1)
count = (y1-y0)*(x1-x0)
sum_ = int_img[y1, x1]-int_img[y0, x1]-int_img[y1, x0]+int_img[y0, x0]
if input_img[row, col]*count < sum_*(100.-T)/100.:
out_img[row,col] = 0
else:
out_img[row,col] = 255
return out_img
Я попытался повторно реализовать алгоритм, но без использования массива 1D и переключения на массив 2D numpy, чтобы лучше пойти с оригинальным алгоритмом, упомянутым в фактической статье. Im использует это для исследования анализа данных с использованием моделей глубокого обучения. Это реализация:
import numpy, gc
from ctypes import *
def adaptive_threshold(self):
gc.collect()
gc.disable()
w, h = self._image.width, self._image.height
s, t = w//8, 0.15
summ = c_uint32(0)
count = c_uint32(0)
pixels = self._pixels
int_img = numpy.ndarray(shape=(w, h), dtype=c_int64)
for i in range(w):
summ.value = 0
for j in range(h):
summ.value += sum(pixels[i, j])
if i != 0:
int_img[i, j] = int_img[i - 1, j] + summ.value
else:
int_img[i, j] = summ.value
x1, x2, y1, y2 = c_uint16(0), c_uint16(0), c_uint16(0), c_uint16(0)
for i in range(w):
for j in range(h):
x1.value = max(i - s // 2, 0)
x2.value = min(i + s // 2, h - 1)
y1.value = max(j - s // 2, 0)
y2.value = min(j + s // 2, h - 1)
count.value = (x2.value - x1.value) * (y2.value - y1.value)
summ.value = int_img[x2.value][y2.value] - int_img[x1.value][y2.value] - \
int_img[x2.value][y1.value] + int_img[x1.value][y1.value]
if sum(pixels[i, j]) * count.value < summ.value * (1.0 - t):
pixels[i, j] = 0, 0, 0
else:
pixels[i, j] = 255, 255, 255
gc.enable()
обратите внимание, что это часть класса. Он в основном имеет две переменные: _image, который указывает на фактическое изображение, и _pixels, который является классом PixelAccess, который позволяет получить доступ к пикселям в качестве заданных значений. Я используется деление пола ( / / ) вместо обычного деления ( / ), поскольку оно гарантирует, что все значения целочисленны. Пока результаты выглядят хорошо. Я использовал типы данных C для управления использованием памяти и сохранения значений в фиксированных положениях. Насколько я понимаю, это помогает контролировать небольшое количество данных для минимизации фрагментированных данных.
плюс это последний квартал 2018 года. Люди по-прежнему используют PIL, и, честно говоря, пока это делает свою работу. Это отлично подходит для цветового пространства RGB. Если вы используете это на общих изображениях вы можете преобразовать данные изображения в пространство RGB с помощью:
Image.convert('RGB')
где "Image" является экземпляром open image
это занимает пару секунд на изображениях, которые считаются HD, как 1200x700 изображений, но это заняло несколько долей секунды на образце изображения. Результате Изображения
{kind=link}
надеюсь, это кому-то поможет.