Как обнаружить сдвиг между изображениями
Я анализирую несколько изображений и должен быть в состоянии сказать, сдвинуты ли они по сравнению с эталонным изображением. Цель состоит в том, чтобы сказать, перемещалась ли камера вообще между захватами изображений. В идеале я хотел бы иметь возможность исправить сдвиг, чтобы все еще делать анализ, но, как минимум, мне нужно иметь возможность определить, смещено ли изображение, и отбросить его, если оно находится за определенным порогом.
вот несколько примеров сдвигов в изображении, которые я хотел бы обнаружить:

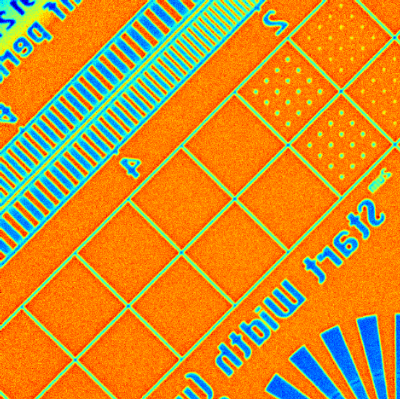
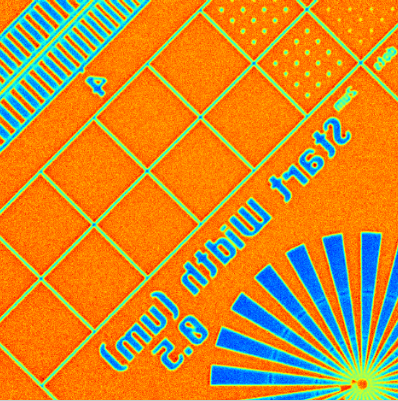
Я буду использовать первое изображение в качестве ссылки, а затем сравнить все следующие изображения, чтобы это выяснить, если они сдвинуты. Изображения серого масштаба (они просто отображаются в цвете с помощью тепловой карты) и хранятся в массиве 2-D numpy. Любой идеи, как я могу это сделать? Я бы предпочел использовать пакеты, которые я уже установил (scipy, numpy, PIL, matplotlib).
3 ответов
As Lukas Graf подсказки, вы ищете перекрестную корреляцию. Он работает хорошо, если:
- масштаб ваших изображений существенно не меняется.
- в изображениях нет изменения вращения.
- в изображениях нет значительного изменения освещенности.
для простых переводов перекрестная корреляция очень хороша.
самый простой инструмент перекрестной корреляции -scipy.signal.correlate. Однако он использует тривиальный метод для кросс-корреляция, которая равна O (n^4) для двумерного изображения с длиной стороны n. На практике, с вашими изображениями это займет очень много времени.
лучше тоже scipy.signal.fftconvolve поскольку свертка и корреляция тесно связаны.
что-то вроде этого:
import numpy as np
import scipy.signal
def cross_image(im1, im2):
# get rid of the color channels by performing a grayscale transform
# the type cast into 'float' is to avoid overflows
im1_gray = np.sum(im1.astype('float'), axis=2)
im2_gray = np.sum(im2.astype('float'), axis=2)
# get rid of the averages, otherwise the results are not good
im1_gray -= np.mean(im1_gray)
im2_gray -= np.mean(im2_gray)
# calculate the correlation image; note the flipping of onw of the images
return scipy.signal.fftconvolve(im1_gray, im2_gray[::-1,::-1], mode='same')
смешной индексации im2_gray[::-1,::-1] поворачивает его на 180° (зеркала как горизонтально, так и вертикально). Это разница между сверткой и корреляцией, корреляция свертка с второй сигнал отражен.
теперь, если мы просто сопоставим первое (самое верхнее) изображение с самим собой, мы получим:
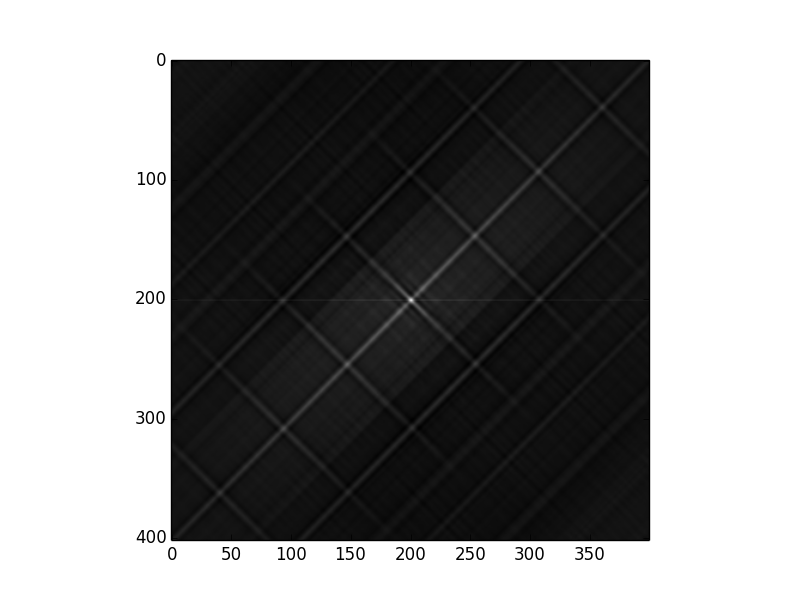
это дает меру самоподобия изображения. Самое яркое пятно находится в (201, 200), которое находится в центре изображения (402, 400).
самые яркие координаты пятна можно найти:
np.unravel_index(np.argmax(corr_img), corr_img.shape)
линейное положение самого яркого пикселя возвращается argmax, но он должен быть преобразован обратно в 2D координаты с unravel_index.
затем мы попробуем то же самое, сопоставив первое изображение со вторым изображением:
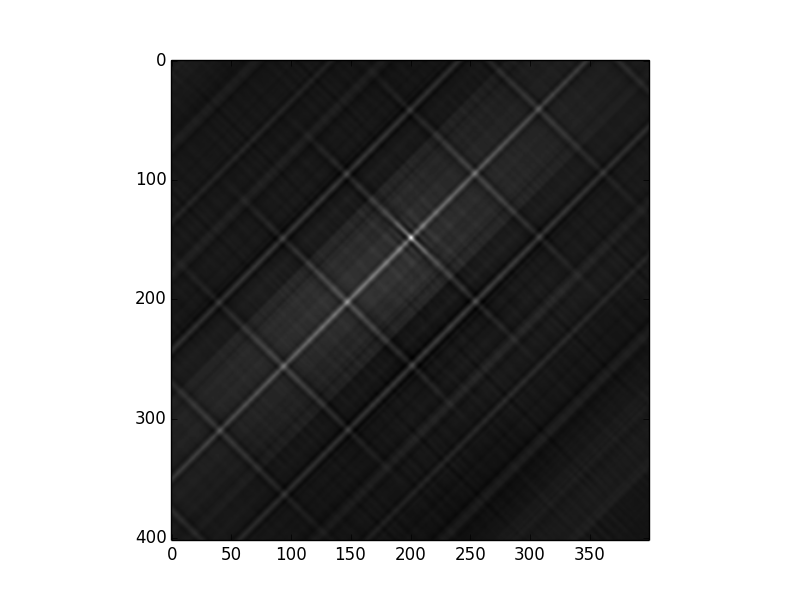
корреляционное изображение выглядит аналогично, но лучшая корреляция переместилась в (149,200), т. е. 52 пикселя вверх на изображении. Это смещение между двумя изображениями.
это, кажется, работает с этими простыми изображениями. Однако могут быть и ложные пики корреляции, а также любая из проблем, изложенных в начало этого ответа может испортить результаты.
в любом случае, вы должны рассмотреть возможность использования оконной функции. Выбор функции не так важен, пока что-то используется. Кроме того, если у вас возникли проблемы с небольшим вращением или изменением масштаба, попробуйте соотнести несколько небольших областей с окружающим изображением. Это даст вам различные перемещения в разных положениях изображения.
другой способ решить это-вычислить точки отсева в обоих изображениях, использовать RANSAC, чтобы избавиться от выбросов, а затем решить для перевода с помощью оценки наименьших квадратов.
Как сказал Бхарат, а другой использует функции просеивания и Ransac:
import numpy as np
import cv2
from matplotlib import pyplot as plt
def crop_region(path, c_p):
"""
This function crop the match region in the input image
c_p: corner points
"""
# 3 or 4 channel as the original
img = cv2.imread(path, -1)
# mask
mask = np.zeros(img.shape, dtype=np.uint8)
# fill the the match region
channel_count = img.shape[2]
ignore_mask_color = (255,)*channel_count
cv2.fillPoly(mask, c_p, ignore_mask_color)
# apply the mask
matched_region = cv2.bitwise_and(img, mask)
return matched_region
def features_matching(path_temp,path_train):
"""
Function for Feature Matching + Perspective Transformation
"""
img1 = cv2.imread(path_temp, 0) # template
img2 = cv2.imread(path_train, 0) # input image
min_match=10
# SIFT detector
sift = cv2.xfeatures2d.SIFT_create()
# extract the keypoints and descriptors with SIFT
kps1, des1 = sift.detectAndCompute(img1,None)
kps2, des2 = sift.detectAndCompute(img2,None)
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks = 50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1, des2, k=2)
# store all the good matches (g_matches) as per Lowe's ratio
g_match = []
for m,n in matches:
if m.distance < 0.7 * n.distance:
g_match.append(m)
if len(g_match)>min_match:
src_pts = np.float32([ kps1[m.queryIdx].pt for m in g_match ]).reshape(-1,1,2)
dst_pts = np.float32([ kps2[m.trainIdx].pt for m in g_match ]).reshape(-1,1,2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC,5.0)
matchesMask = mask.ravel().tolist()
h,w = img1.shape
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv2.perspectiveTransform(pts,M)
img2 = cv2.polylines(img2, [np.int32(dst)], True, (0,255,255) , 3, cv2.LINE_AA)
else:
print "Not enough matches have been found! - %d/%d" % (len(g_match), min_match)
matchesMask = None
draw_params = dict(matchColor = (0,255,255),
singlePointColor = (0,255,0),
matchesMask = matchesMask, # only inliers
flags = 2)
# region corners
cpoints=np.int32(dst)
a, b,c = cpoints.shape
# reshape to standard format
c_p=cpoints.reshape((b,a,c))
# crop matching region
matching_region = crop_region(path_train, c_p)
img3 = cv2.drawMatches(img1, kps1, img2, kps2, g_match, None, **draw_params)
return (img3,matching_region)