настройка углов и обрезка изображения openCV
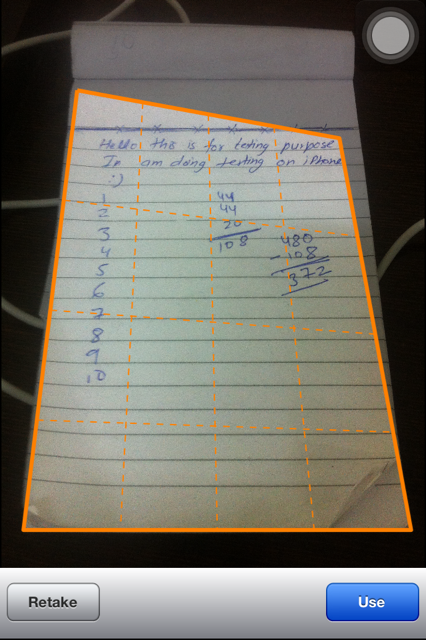
Я использую open CV в IOS. Я уже обнаружил границу листа бумаги на изображении, как показано на рисунке, и теперь мне нужно перетащить эту линию границы на ощупь для настройки кадра обрезки. как мы можем отрегулировать линию границы и как мы можем обрезать изображение внутри границы?
это возможно в openCV или я использую openGL для этого?
@moosgummi: я вызываю ваш метод ниже method
- (cv::Mat)finshWork:(cv::Mat &)image
{
Mat img0 =image;
Mat img1;
cvtColor(img0, img1, CV_RGB2GRAY);
// apply your filter
Canny(img1, img1, 100, 200);
// find the contours
vector< vector<cv::Point> > contours;
findContours(img1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
// you could also reuse img1 here
Mat mask = Mat::zeros(img1.rows, img1.cols, CV_8UC1);
// CV_FILLED fills the connected components found
drawContours(mask, contours, -1, Scalar(255), CV_FILLED);
// let's create a new image now
Mat crop(img0.rows, img0.cols, CV_8UC3);
// set background to green
crop.setTo(Scalar(0,255,0));
// and copy the magic apple
img0.copyTo(crop, mask);
// normalize so imwrite(...)/imshow(...) shows the mask correctly!
normalize(mask.clone(), mask, 0.0, 255.0, CV_MINMAX, CV_8UC1);
std::vector<cv::Point> biggestContour = contours[contours.size()-1];
NSLog(@"%d",biggestContour[0].x);
NSLog(@"%d",biggestContour[0].y);
cv::Mat paperImage =[self getPaperAreaFromImage:image:biggestContour];
//return crop;
return paperImage;
}
Спасибо Всем
2 ответов
после того как вы получили углы у вас для выравнивания бумаги и "извлечь" его новый образ.
вы должны сделать следующее:
- Сортировать угловые точки (порядок имеет значение; они должны быть в том же порядке в обоих векторах)
cv::getAffineTransformcv::warpAffine
я написал себе вспомогательную функцию, которая принимает std::vector четыре cv::Point в нем и сортирует их по часовой стрелке начало в левом верхнем углу. Для получения дополнительной информации по этой теме взгляните на эти темы:
- Сортировать точки по часовой стрелке?
- сортировка четырех точек по часовой стрелке
- сортировка точек в 2D пространстве
еще одна вещь, которую вы должны учитывать, - это размер бумаги, которую вы хотите извлечь. В моем примере я предполагаю, что вы извлекаете бумагу DIN A4 (210x297mm). Чувствовать бесплатно редактировать paperWidth и paperHeight внутри моего кода.
объединение всего выглядит следующим образом:
// Helper
cv::Point getCenter( std::vector<cv::Point> points ) {
cv::Point center = cv::Point( 0.0, 0.0 );
for( size_t i = 0; i < points.size(); i++ ) {
center.x += points[ i ].x;
center.y += points[ i ].y;
}
center.x = center.x / points.size();
center.y = center.y / points.size();
return center;
}
// Helper;
// 0----1
// | |
// | |
// 3----2
std::vector<cv::Point> sortSquarePointsClockwise( std::vector<cv::Point> square ) {
cv::Point center = getCenter( square );
std::vector<cv::Point> sorted_square;
for( size_t i = 0; i < square.size(); i++ ) {
if ( (square[i].x - center.x) < 0 && (square[i].y - center.y) < 0 ) {
switch( i ) {
case 0:
sorted_square = square;
break;
case 1:
sorted_square.push_back( square[1] );
sorted_square.push_back( square[2] );
sorted_square.push_back( square[3] );
sorted_square.push_back( square[0] );
break;
case 2:
sorted_square.push_back( square[2] );
sorted_square.push_back( square[3] );
sorted_square.push_back( square[0] );
sorted_square.push_back( square[1] );
break;
case 3:
sorted_square.push_back( square[3] );
sorted_square.push_back( square[0] );
sorted_square.push_back( square[1] );
sorted_square.push_back( square[2] );
break;
}
break;
}
}
return sorted_square;
}
// Helper
float distanceBetweenPoints( cv::Point p1, cv::Point p2 ) {
if( p1.x == p2.x ) {
return abs( p2.y - p1.y );
}
else if( p1.y == p2.y ) {
return abs( p2.x - p1.x );
}
else {
float dx = p2.x - p1.x;
float dy = p2.y - p1.y;
return sqrt( (dx*dx)+(dy*dy) );
}
}
cv::Mat getPaperAreaFromImage( cv::Mat image, std::vector<cv::Point> square )
{
// declare used vars
int paperWidth = 210; // in mm, because scale factor is taken into account
int paperHeight = 297; // in mm, because scale factor is taken into account
cv::Point2f imageVertices[4];
float distanceP1P2;
float distanceP1P3;
BOOL isLandscape = true;
int scaleFactor;
cv::Mat paperImage;
cv::Mat paperImageCorrected;
cv::Point2f paperVertices[4];
// sort square corners for further operations
square = sortSquarePointsClockwise( square );
// rearrange to get proper order for getPerspectiveTransform()
imageVertices[0] = square[0];
imageVertices[1] = square[1];
imageVertices[2] = square[3];
imageVertices[3] = square[2];
// get distance between corner points for further operations
distanceP1P2 = distanceBetweenPoints( imageVertices[0], imageVertices[1] );
distanceP1P3 = distanceBetweenPoints( imageVertices[0], imageVertices[2] );
// calc paper, paperVertices; take orientation into account
if ( distanceP1P2 > distanceP1P3 ) {
scaleFactor = ceil( lroundf(distanceP1P2/paperHeight) ); // we always want to scale the image down to maintain the best quality possible
paperImage = cv::Mat( paperWidth*scaleFactor, paperHeight*scaleFactor, CV_8UC3 );
paperVertices[0] = cv::Point( 0, 0 );
paperVertices[1] = cv::Point( paperHeight*scaleFactor, 0 );
paperVertices[2] = cv::Point( 0, paperWidth*scaleFactor );
paperVertices[3] = cv::Point( paperHeight*scaleFactor, paperWidth*scaleFactor );
}
else {
isLandscape = false;
scaleFactor = ceil( lroundf(distanceP1P3/paperHeight) ); // we always want to scale the image down to maintain the best quality possible
paperImage = cv::Mat( paperHeight*scaleFactor, paperWidth*scaleFactor, CV_8UC3 );
paperVertices[0] = cv::Point( 0, 0 );
paperVertices[1] = cv::Point( paperWidth*scaleFactor, 0 );
paperVertices[2] = cv::Point( 0, paperHeight*scaleFactor );
paperVertices[3] = cv::Point( paperWidth*scaleFactor, paperHeight*scaleFactor );
}
cv::Mat warpMatrix = getPerspectiveTransform( imageVertices, paperVertices );
cv::warpPerspective(_image, paperImage, warpMatrix, paperImage.size(), cv::INTER_LINEAR, cv::BORDER_CONSTANT );
// we want portrait output
if ( isLandscape ) {
cv::transpose(paperImage, paperImageCorrected);
cv::flip(paperImageCorrected, paperImageCorrected, 1);
return paperImageCorrected;
}
return paperImage;
}
использование:
// ... get paper square ...
cv::Mat paperImage = getPaperAreaFromImage( srcImage, paperSquare );
что вы должны сделать, это :
кормите 4 угла, которые вы нашли, и 4 реальных угла изображения в
cv::getPerspectiveTransform. Это даст вам матрицу преобразования перспективы, которая будет деформировать четырехугольник на все изображение.использовать
cv::WarpPerspectiveсоздать изображение, которое вы хотите.
ссылки приведут вас к документации.
EDIT : вы можете использовать cv::findHomography сделать Шаг 1. Но это больше о том, чтобы иметь много соответствующих точек и выбросов.
EDIT: вот пример. Это с интерфейсом C, но вы можете легко заставить его работать с C++
#include <stdio.h>
#include "highgui.h"
#include "cv.h"
int main( int argc, char** argv ) {
// cvLoadImage determines an image type and creates datastructure with appropriate size
IplImage* img = cvLoadImage( argv[1], CV_LOAD_IMAGE_COLOR);
IplImage* img1 = cvCreateImage(
cvSize(img->width, img->height),
img->depth,
img->nChannels
);
cvNamedWindow( "out", CV_WINDOW_AUTOSIZE );
cvShowImage( "out", img1 );
// create a window. Window name is determined by a supplied argument
cvNamedWindow( argv[1], CV_WINDOW_AUTOSIZE );
// Display an image inside and window. Window name is determined by a supplied argument
cvShowImage( argv[1], img );
// The part you need
// Here is the points that you take the image from (the small quadrangle)
CvPoint2D32f first[4] = {
{0,0},
{(img->width /4)* 3, img->height /4 },
{ img->width /4 ,(img->height /4) *3},
{(img->width /4)* 3,(img->height /4) *3},
};
// Here are the points that you draw the quadrangle into (the four corners)
CvPoint2D32f second[4] = {
{0,0},
{img->width,0},
{0,img->height},
{img->width,img->height}
};
// The part you need
CvMat *transform = cvCreateMat(3,3, CV_32F);
cvGetPerspectiveTransform(first,second, transform);
cvWarpPerspective(img, img1, transform, CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS,
cvScalarAll(0));
// End of part you need
cvShowImage( "out", img1 );
// wait indefinitely for keystroke
cvWaitKey(0);
// release pointer to an object
cvReleaseImage( &img );
// Destroy a window
cvDestroyWindow( argv[1] );
}
вы должны заменить массив first с конечными точками четырехугольника, который вы нашли.
EDIT: вот некоторые примеры. Я не очень хорошо их осмотрел.